Abstract
We present a novel motion
planning algorithm that efficiently generates physics-based samples in
a kinematically and dynamically constrained space of a highly
articulated chain. Similar to prior kinodynamic planning methods, the
sampled nodes in our roadmaps are generated based on dynamic
simulation. Moreover, we bias these samples by using
constraint
forces designed to avoid collisions while moving toward the goal
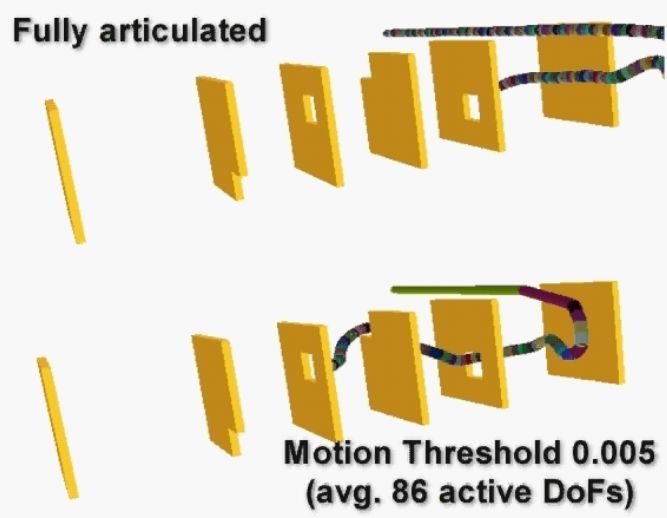
configuration. We adaptively reduce the complexity of the state space
by determining a subset of joints that contribute most towards the
motion and only simulate these joints. Based on these configurations,
we compute a valid path that satisfies non-penetration, kinematic, and
dynamics constraints. Our approach can be easily combined with a
variety of motion planning algorithms including probabilistic roadmaps
(PRMs) and rapidly-exploring random trees (RRTs) and applied to
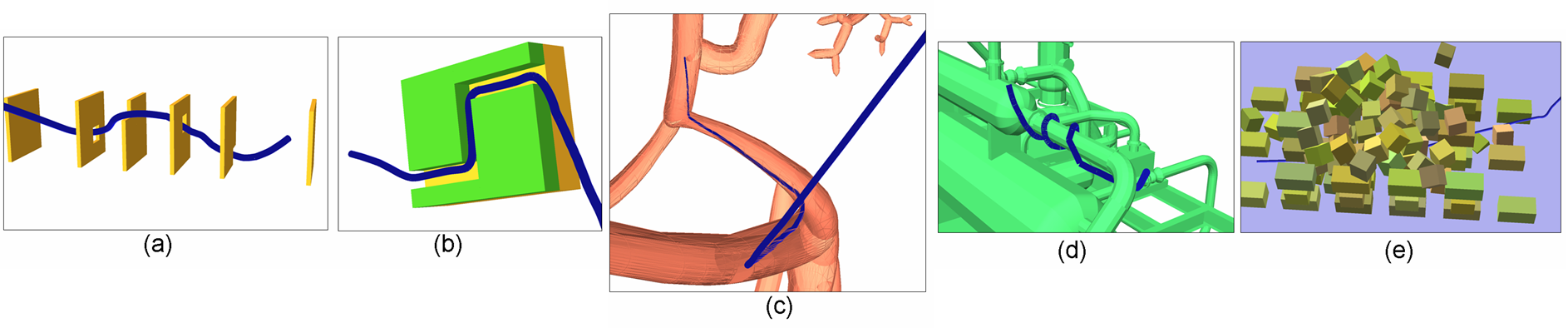
articulated robots with hundreds of joints. We demonstrate
the
performance of our algorithm on several challenging benchmarks.