Practical Local
Planning in the Contact Space
Stephane Redon and Ming C. Lin
Department of Computer
Science
University of North Carolina at Chapel Hill
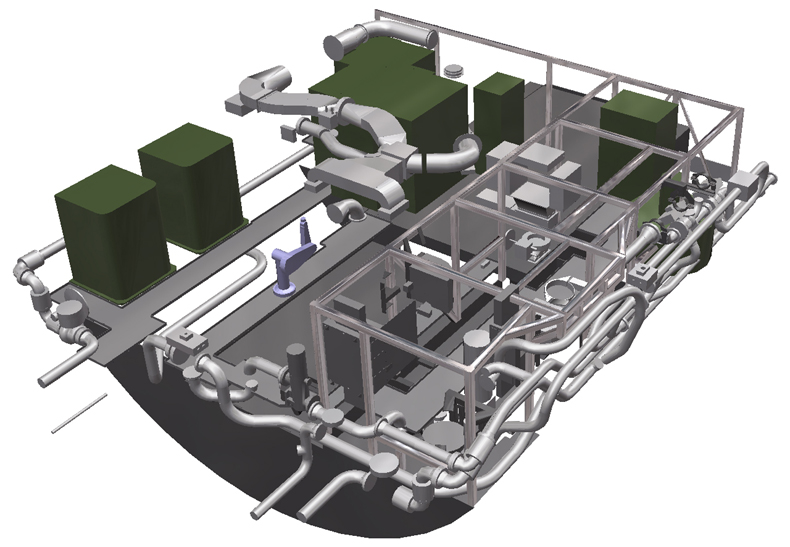
Planning the motion of a Puma Robot (800 triangles, 7 dofs) in a partial Auxiliary Machine Room model (117,000 triangles). Complex environments and tasks involving cluttered or narrow passages are typically difficult for randomized planning methods. Our local planning method efficiently samples the contact space and constrains the sampling to accelerate planning on these challenging scenarios. Our preliminary results indicate up to 70 times performance improvement when our contact-space planning method is incorporated with a state-of-the-art planning library.
Abstract
Proximity query is an integral part of
any motion planning algorithm and takes up the majority of planning time.
Due to performance issues, most existing planners perform queries at fixed
sampled configurations, sometimes resulting in missed collisions.
Moreover, randomly determining collision-free configurations makes it
difficult to obtain samples close to, or on, the surface of C-obstacles in
the configuration space. In this paper, we present an efficient and
practical local planning method in contact-space which uses continuous
collision detection (CCD). We show how, using the precise contact
information provided by a CCD algorithm, a randomized planner can be
enhanced by efficiently sampling the contact-space, as well as by
constraining the sampling when the roadmap is expanded. We have included
our contact-space planning methods in a freely available state-of-the-art
planning library - the Stanford MPK library. We have been able to observe
that in complex scenarios involving cluttered and narrow passages, which
are typically difficult for randomized planners, the enhanced planner
offers up to 70 times performance improvement when our contact-space
sampling and constrained sampling methods are enabled. Download paper [1.34
MBytes]
Authors' pages:
Stephane
Redon
Ming C.
Lin
Links:
The Stanford MPK Library
Fast Continuous Collision Detection for Articulated Models
Results
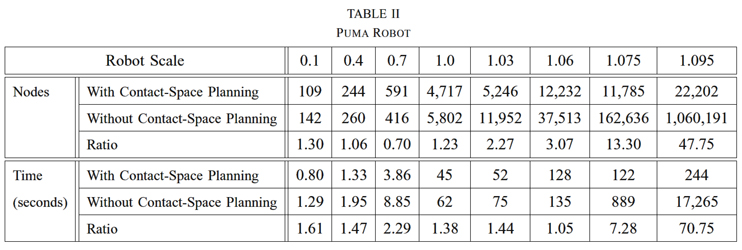
For each set of benchmarks, we have
varied the difficulty of the problem by modifying the scale of the mobile
robot, so as to increase the difficulty of sampling the narrow passages
(i.e. increasing the narrowness in configuration space). For each scale
tested, we have conducted 10 tests and measured the time required to plan
the motion for each test, as well as the total number of nodes present in
the roadmap when the planner terminates. We then average the results over
the ten tests for each scale. For each test, the planner is queried twice
on the same pair of initial and final configurations: the first time with
the default MPK settings, and the second time with contact-space planning
enabled.
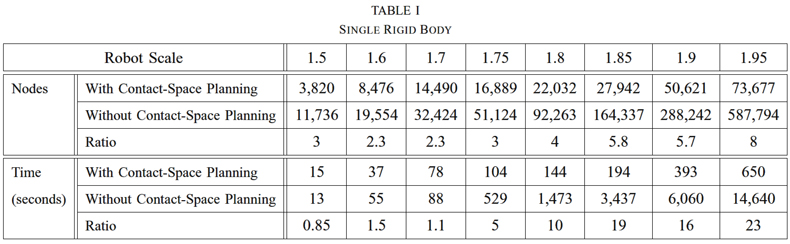
Single Rigid Body
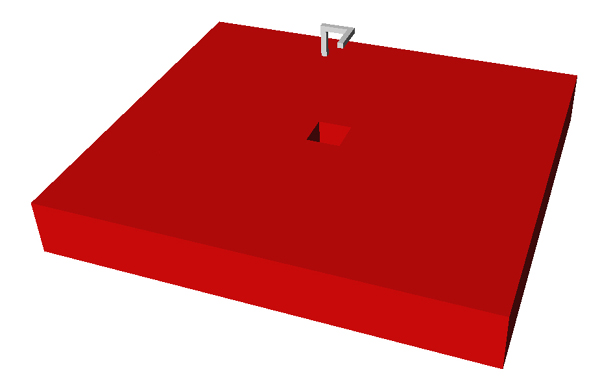
A single rigid body must go from one side of the obstacle
to the other through the opening (robot scale: 1.85).
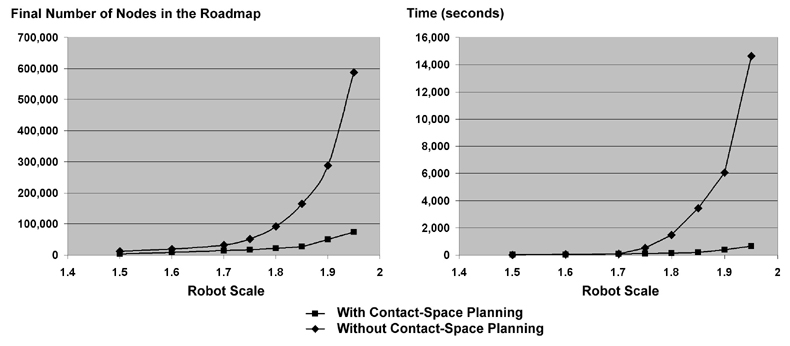
Benefits of our contact-space planning method when the scale of the rigid body increases. In the most difficult benchmark, enabling both contact-space sampling and constrained sampling allows us to determine a path within a few minutes, providing up to 20 times performance gain. As expected, much fewer nodes are required to determine a path when contact-space planning is enabled.
Puma Robot and Auxiliary Machine Room
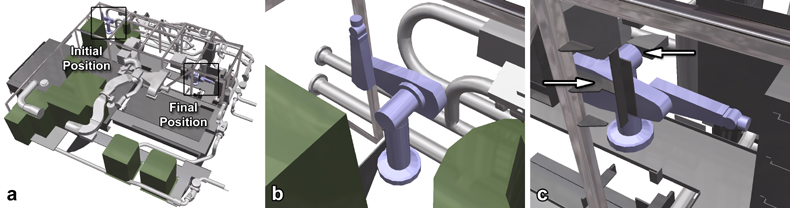
Planning the motion of a Puma Robot (800 triangles, 7 dofs) in a
partial Auxiliary Machine Room model (117,000 triangles). The Puma robot must
go from an initial uncluttered position (b) to a final position close to
environment obstacles (c, close-by obstacles indicated by arrows). The scale of
the Puma robot in this figure is 1.095, in which case enabling contact-space
planning leads to about 70 times performance improvement.
This material is presented to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted without the explicit permission of the copyright holder.
Last revision : September 15, 2004