Velocity-Based Modeling of Physical Interactions in Multi-Agent Simulations for Dense Crowds
Sujeong Kim1, Stephen J. Guy2,
Karl Hillesland3,
Basim Zafar4, Adnan Gutub4,
Dinesh Manocha1
1University of North Carolina at Chapel-Hill,
2University of Minnesota,
3Advanced Micro Devices (AMD),
4Umm Al-Qura University.
![]()
We present an interactive algorithm to model physics-based interactions in dense crowds. Our approach is capable of modeling both physical forces and interactions between agents and obstacles, while also allowing the agents to anticipate and avoid upcoming collisions during local navigation. We combine velocity-based collision-avoidance algorithms with external physical forces. The overall formulation produces various effects of forces acting on agents and crowds, including balance recovery motion and force propagation through the crowd. We further extend our method to model more complex behaviors involving social and cultural rules. We use finite state machines to specify a series of behaviors and demonstrate our approach on many complex scenarios. Our algorithm can simulate a few thousand agents at interactive rates and can generate many emergent behaviors. |
[Download]
-
The Visual Computer [Springer Link] [Bibtex] [PDF]
-
SCA 2013 Paper [PDF]
[Benchmarks]
We provide brief descriptions of benchmarks here. For more information, please see the video below.
 |
Agent-agent Interactions Push-through and Bottleneck benchmarks show physical interactions between agents, such as pushing, collision, and balance recovery motion. |
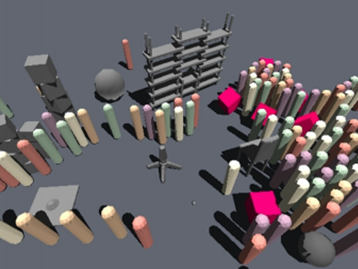 |
Agent-object Interactions Wall-breaking and Office benchmarks show physical interactions between agents and dynamic obstacles. Virtual agents can apply forces to dynamic obstacles (rigid bodies) while avoid collisions with other agents and static/dynamic obstacles. We use Bullet Physics Engine to simulate rigid body dynamics. |
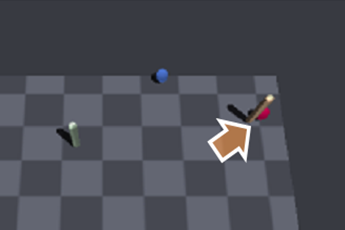 |
Higher-level behavior modeling Dodge-ball benchmark shows a simple but effective way to model higher-level behavior using Finite State Machines (FSM). |
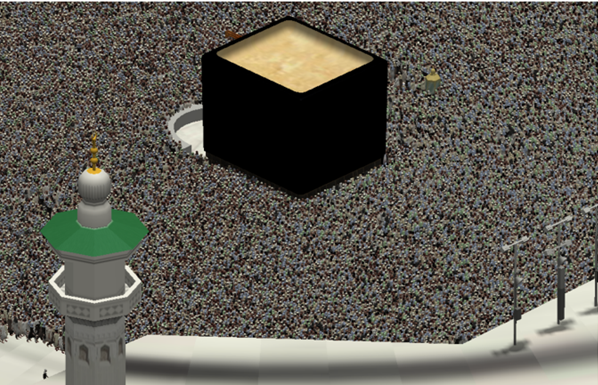 |
Large-scale crowd benchmark Tawaf benchmark shows large-scale, dense crowd simulation using our system. 35,000 virtual agents are simulated with different collision avoidance and physical interaction parameters. |
[Video]