|
D-Plan: Efficient Collision-Free
Path Computation For Part Removal and Disassembly Liangjun
Zhang, Xin Huang, Young J. Kim and Dinesh Manocha We present a novel
approach to compute a collision-free path for part disassembly simulation and
virtual prototyping of part removal. Our algorithm is based on sample-based
motion planning that connects collision-free samples in the configuration
space using local planning. In order to effectively handle the tight-fitting
scenarios, we describe techniques to generate samples in narrow passages and
efficient local planning algorithms to connect them with collision-free
paths. Our approach is general, makes no assumption about model connectivity
or object topology, and can handle polygon soup models that frequently arise
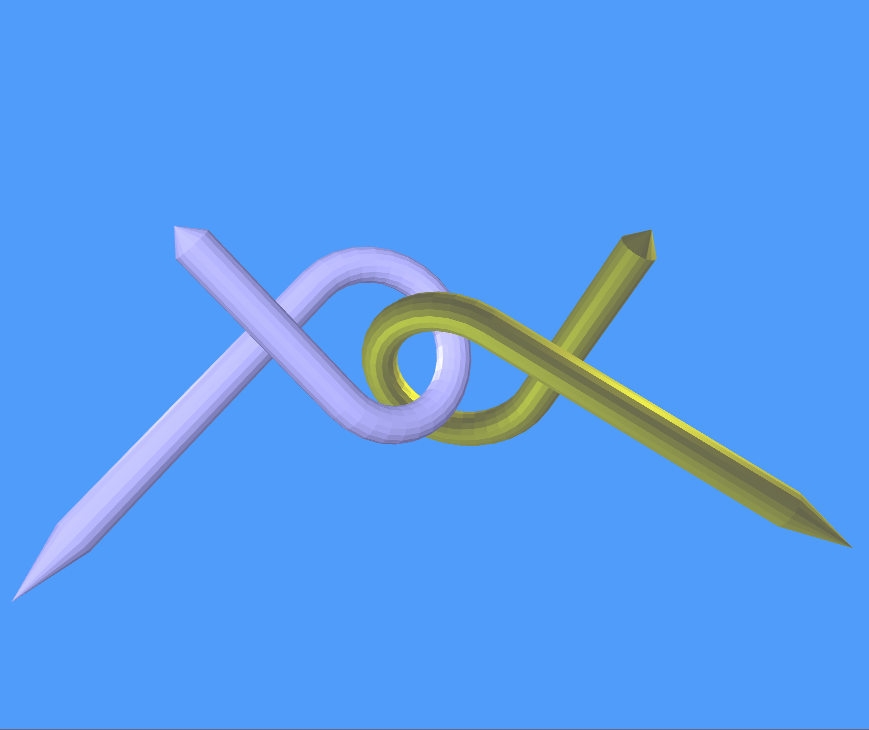
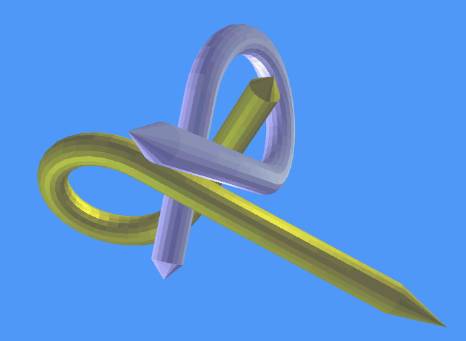
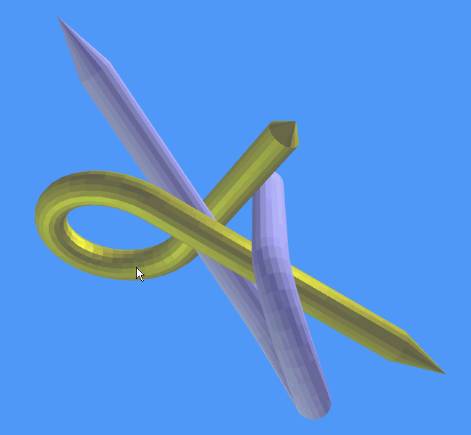
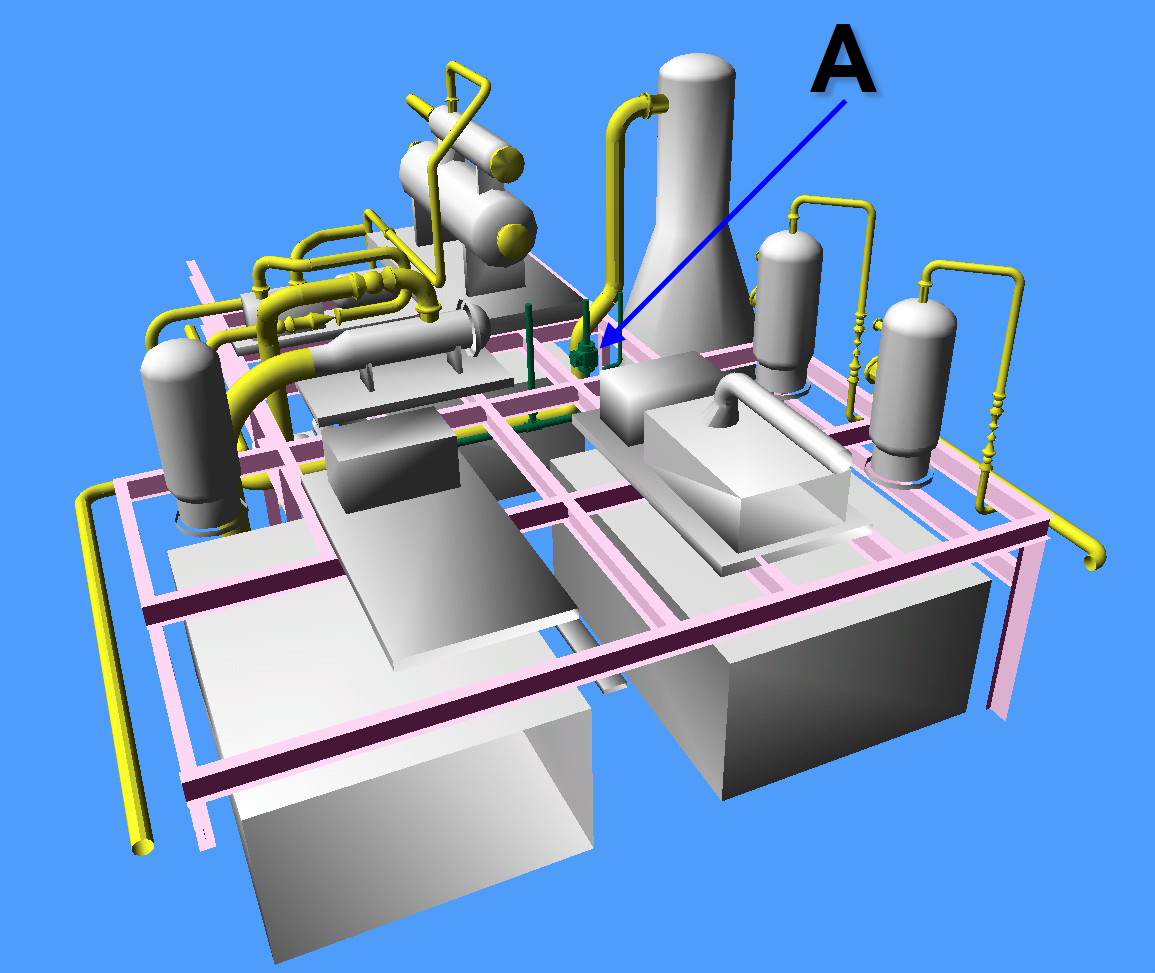
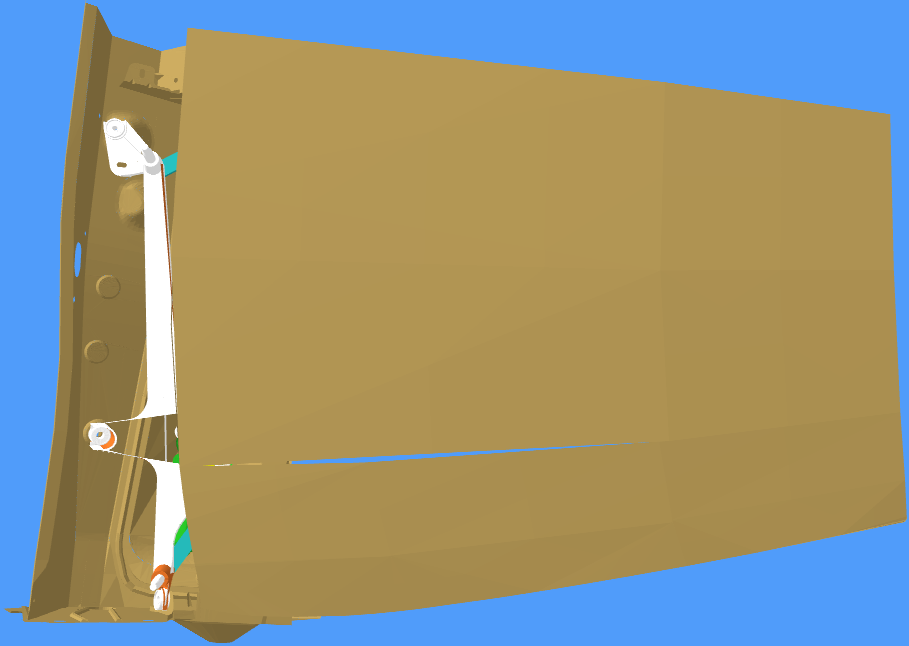
in CAD applications. We highlight the performance on many challenging
benchmarks including the Alpha puzzle, maintainability of the windscreen
wiper motion, and disassembly of a seat from the interior of a car body.
Results
|