Human Motion Planning and Synthesis
GAMMA group, UNC
|
|
|


Publications
Motion Planning of Human-Like Robots Using
Constrained Coordination, Liangjun Zhang,
Jia Pan, Dinesh Manocha
IEEE-RAS International
Conference on Humanoid Robots (Humanoids09)
, 2009, PDF
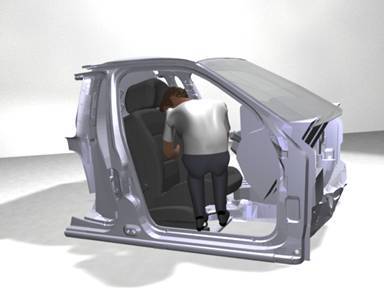
Abstract: We present a whole-body
motion planning algorithm for human-like robots. The planning problem is
decomposed into a sequence of low-dimensional sub-problems. Our formulation is
based on the fact that a human-like model is a tightly coupled system and we
use a constrained coordination scheme to solve the sub-problems in an
incremental manner. We also present a local path refinement algorithm to
compute collision-free paths in tight spaces and satisfy the statically stable
constraint on CoM. We demonstrate the performance of our algorithm on an
articulated human-like model and generate efficient motion strategies in
complex CAD models.
A Hybrid Approach for Synthesizing Human Motion in Constrained
Environments, Jia Pan, Liangjun Zhang, Ming Lin, Dinesh Manocha
the 23rd International
Conference on Computer Animation and Social Agents (CASA 2010), 2010, PDF
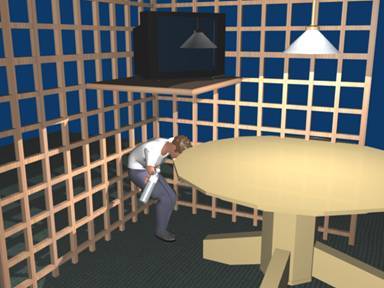
Abstract: We present a new algorithm
to generate plausible motions for high-DOF human-like articulated figures in
constrained environments with multiple obstacles. Our approach is general and
makes no assumptions about the articulated model or the environment. The
algorithm combines hierarchical model decomposition with sample-based planning
to efficiently compute a collision-free path in tight spaces. Furthermore, we
use path perturbation and replanning techniques to satisfy the kinematic and
dynamic constraints on the motion. In order to generate realistic human-like
motion, we present a new motion blending algorithm that refines the path
computed by the planner with motion capture data to compute a smooth and
plausible trajectory. We demonstrate the results of generating motion
corresponding to placing or lifting object, walking and bending for a 38-DOF
articulated model.
Results and Videos
|
|
|
Download the video (avi format)
Acknowledgements
We
would like to thank Jean-Paul Laumond and Kineo CAM for providing car models.
We would like to thank Sean Curtis and Will Moss for their help in video and
rendering. This research was supported in part by ARO Contract
W911NF-04-1-0088, NSF awards 0636208, 0917040 and 0904990, DARPA/RDECOM
Contract WR91CRB-08-C-0137, and Intel. Liangjun Zhang was supported in part by
CRA/NSF/CCC Computing Innovation Fellows Project.
Related Links
UNC GAMMA Motion and Path
Planning
Retraction-based
Planners for Rigid and Articulated Models