Fast Collision Detection between Massive Models using
Dynamic Simplification
Realtime captured video of dynamic simulation and navigation
(You can download QuickTime from QuickTime)
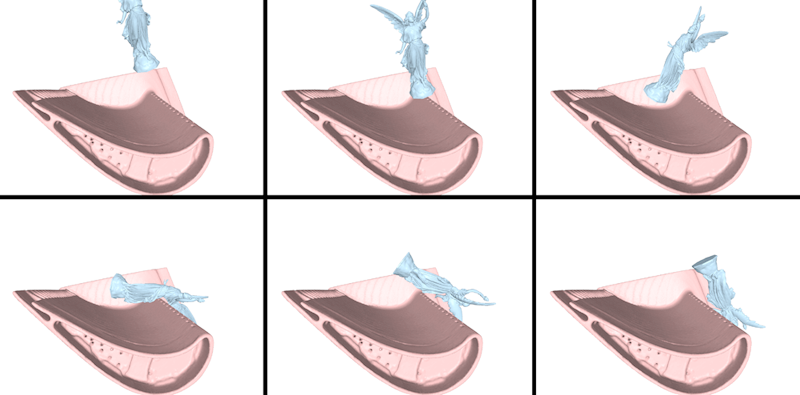
Figure 1: Collision Example. This image sequence shows
discrete positions from our dynamic simulation using our system. The
28M-triangle Lucy model falls on and then off the 1.7M-triangle turbine-blade
model and the response is computed using impulse-based simulation. In this
simulation the collision detection took an average of 18ms per timestep. The
error bound was set to be 0.04% of the width of the Lucy.
Abstract: We present a novel approach for collision detection between large
models composed of tens of millions of polygons.
Each model is represented as a clustered hierarchy of progressive meshes (CHPM). CHPM is a dual hierarchy of
the original model; it serves both as a multiresolution representation of the original model, as well as a bounding
volume hierarchy. We use the cluster hierarchy of a CHPM to perform coarse-grained selective refinement and
the progressive meshes for fine-grained local refinement. We present a novel conservative error metric to perform
collision queries based on the multiresolution representation. We use this error metric to perform dynamic simplification
for collision detection. Our approach is conservative in that it may overestimate the set of colliding
triangles, but never misses collisions. Furthermore, we are able to generate these hierarchies and perform collision
queries using out-of-core techniques on all triangulated models. We have applied our algorithm to perform
conservative collision detection between massive CAD and scanned models, consisting of millions of triangles at
interactive rates on a commodity PC.
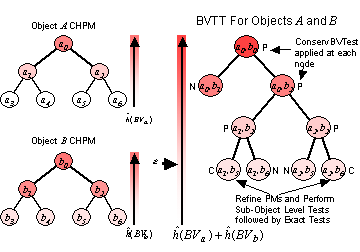
Figure 2: CHPM Hierarchy. We represented the scene as a clustered
hierarchy of progressive meshes (CHPM). The CHPM serves
as a dual hierarchy: an LOD hierarchy for conservative errorbounded
collision and as a bounding volume hierarchy for collision
culling. Each cluster contains a progressive mesh and a bounding
volume that encloses all geometry in its subtree.
Contents
Paper: Fast Collision Detection between Massive Models using
Dynamic Simplification
, To appear in the Proceeding of the Eurographics Symposium on Geometry
Processing, 2004
Related Links
Quick-VDR: Interactive View-Dependent Rendering of Massive Models
UNC Walkthru Group
CB #3175, Department of Computer Science
University of North Carolina
Chapel Hill, NC 27599-3175
919.962.1749
geom@cs.unc.edu