We present a real-time algorithm to learn varying pedestrian behavior characteristics from real-world videos. Our formulation is based on behavior classification using Personality Trait Theory. We present a scheme to dynamically learn the behavior of every pedestrian in the scene and use that to compute its motion parameters and future states using Bayesian inference. This behavior learning scheme makes no assumptions about prior pedestrian motion or crowd density and uses a precomputed database. We use behavior classification for real-time path prediction and navigation in low and medium density videos with tens of pedestrians. We highlight the improvement in accuracy (up to 24%) over prior prediction and navigation methods.
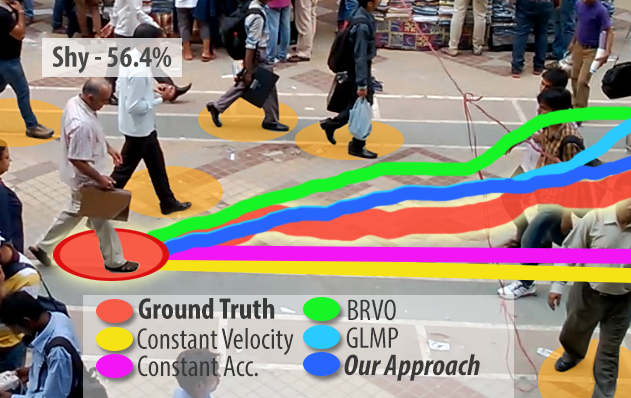 Fig: Our approach can automatically classify the behavior of each pedestrian in real-time. This behavior information is used to dynamically compute the motion parameters and improve the performance of our long term prediction algorithm (shown in dark blue). Our results are very close to ground truth (shown in red) and offer up to 24% improvement over prior real-time prediction algorithms, whose predicted trajectories are shown in different colors.
Fig: Our approach can automatically classify the behavior of each pedestrian in real-time. This behavior information is used to dynamically compute the motion parameters and improve the performance of our long term prediction algorithm (shown in dark blue). Our results are very close to ground truth (shown in red) and offer up to 24% improvement over prior real-time prediction algorithms, whose predicted trajectories are shown in different colors.
This project was funded by Intel, The Boeing Company and National Science Foundation

If you would like to use the dataset, please contact the authors (Aniket Bera and Dinesh Manocha) at ab@cs.unc.edu To see more work on motion and crowd simulation models in our GAMMA group, visit - http://gamma.cs.unc.edu/research/crowds/
![]()