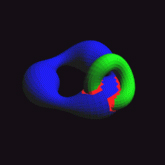
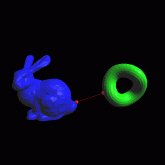
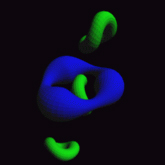
The first picture shows in red the overlapping triangles of two intersecting tori. The middle picture shows a line connecting the closest points of a bunny and torus model. The last picture shows three steps of a collision free path - the path was computed by a path-planner using tolerance verification.
Purpose
PQP is a library for performing three types of proximity queries on a pair of geometric models composed of triangles:
- Collision detection - detecting whether the two models overlap, and optionally, all of the triangles that overlap.
- Distance computation - computing the minimum distance between a pair of models, i.e., the distance between the closest pair of points.
- Tolerance verification - determining whether two models are closer or farther than a tolerance distance.
Copyright 1999. Last modification on June 29, 1999.
Maintained by: geom@cs.unc.edu