Real-time Path Planning for Virtual Agents in Dynamic Environments
(Download DivX codec if you have problems playing
the video using Windows Media Player)
 |
|
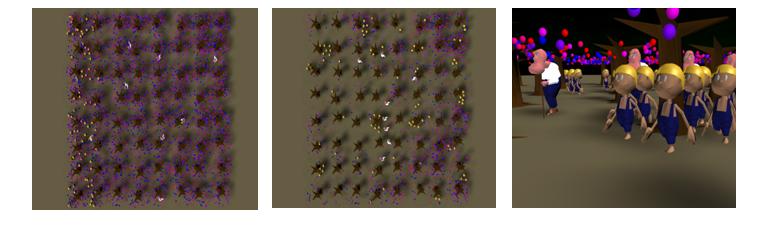
Fruit stealing simulation: A simulation of 96 fruit pickers (yellow
dots) in an orchard with 64K fruit (dark blue and purple) on 64
trees (brown trunks) and 4 farmers (white shirts). Each agent maintains an
independent goal. Left: Initial top view of the
orchard Middle:
Top view in the middle of simulation with many fruit collected Right:
Perspective view of same time step. Our multi-agent navigation graph
based algorithm can perform path planning at 8 fps on a high-end PC. |
Abstract
We present a novel approach for real-time
path planning of multiple
virtual agents in complex dynamic scenes. We introduce a
new data structure, Multi-agent Navigation Graph (MaNG), which
is constructed from the first- and second-order Voronoi diagrams.
The MaNG is used to perform route planning and proximity computations
for each agent in real time. We compute the MaNG using
graphics hardware and present culling techniques to accelerate the
computation. We also address undersampling issues for accurate
computation. Our algorithm is used for real-time multi-agent planning
in pursuit-evasion and crowd simulation scenarios consisting
of hundreds of moving agents, each with a distinct goal.
Publication
Avneesh
Sud, Erik Andersen, Sean Curtis, Ming Lin,
and Dinesh Manocha
Real-time Path Planning for Virtual Agents in Dynamic Environments (preprint) IEEE Virtual Reality 2007.
Avneesh
Sud, Erik Andersen, Sean Curtis, Ming Lin,
and Dinesh Manocha
Real-time Path Planning in Dynamic Virtual Environments Using Multi-agent Navigation Graphs Accepted for publication to IEEE TVCG
Video
Video 1(8MB), Video (28MB,
DivX AVI): Video demonstrating Real-time Path Planning for Virtual Agents in Dynamic Environments.
(Download DivX codec if you have problems playing
the video using Windows Media Player)
Related Work @ UNC-CH
Fast Computation of
Generalized Voronoi Diagrams Using Graphics Hardware
Interactive 3D Distance Field
Computation using Linear Factorization
DiFi: Fast 3D Distance Field Computation Using Graphics Hardware
Proximity Query and Collision
Detection Research at the UNC Computer Science GAMMA Group.
Acknowledgements
RDECOM
Army Research Office
National Science Foundation
UNC GAMMA Group
CB #3175, Department of Computer Science
University of North Carolina
Chapel Hill, NC 27599-3175
919.962.1749
geom@cs.unc.edu