Constraint-based Motion Synthesis for
Deformable Models
William Moss, Ming C. Lin and Dinesh Manocha
We present a fast goal-directed motion synthesis technique that integrates sample-based planning methods with constraint-based dynamics simulation using a finite element formulation to generate collision-free paths for a deformable model. Our method allows the user to quickly specify various constraints, including a desired trajectory as a sparse sequence of waypoints and it automatically compute a physically plausible path that satisfies geometric and physical constraints. We demonstrate the performance of our algorithm by computing realistic motion for animation of deformable characters and simulation of a medical procedure.
Publications
Computer Animation and Virtual Worlds (Proc. of CASA 2008)
Results

A bear containing 5,252 deformable nodes squeezes through a narrowing, rigid tube. Video
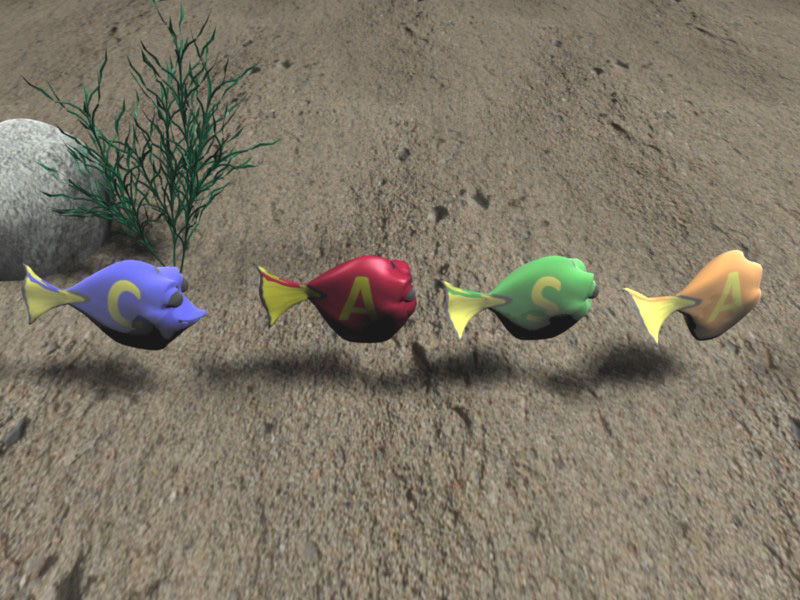
Four fish swim along the ocean floor to form 'CASA'.
Each fish is simulated independently and contains 4,818 nodes. Video
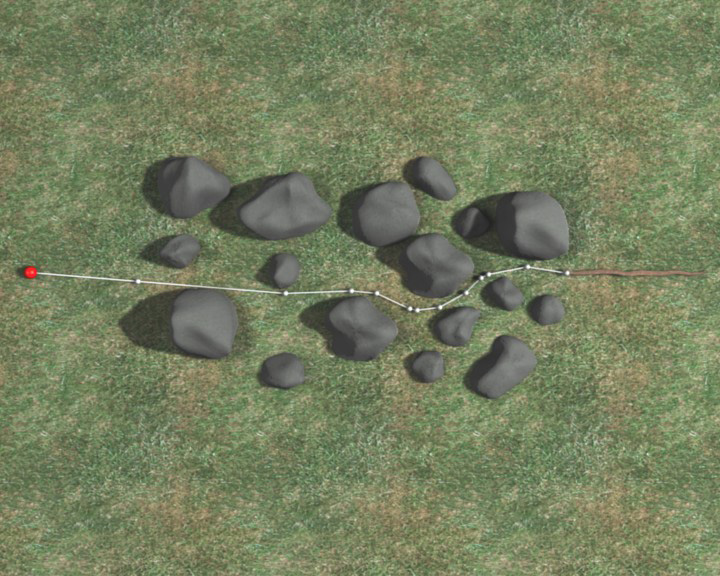

A snake navigates rapidly through a bed of rocks.
The rocks contain 5,302 fixed nodes and the snake is made up of 6,832 deformable nodes. Video

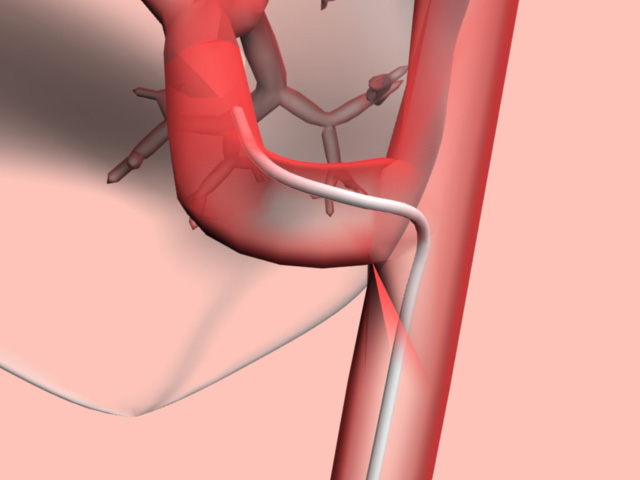
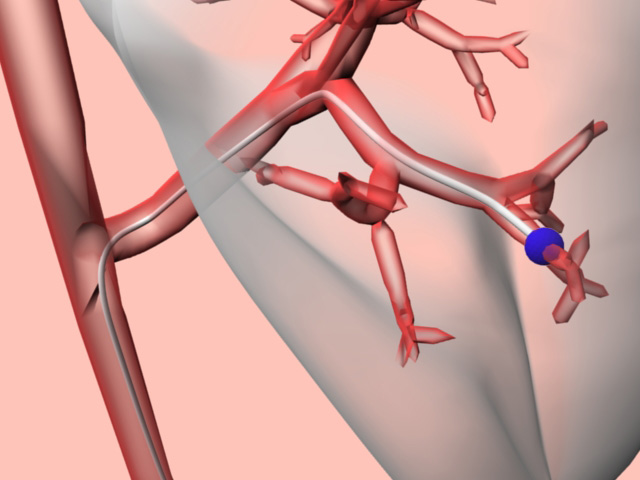
A catheter is inserted into a complex network of arteries.
The catheter is simulated using 3,185 nodes and the arteries are simulated with 8,378. Video
All videos are encoded with the XviD codec.