We present an efficient algorithm for simulating contacts between deformable bodies with high-resolution surface geometry using dynamic deformation textures, which reformulate the 3D elastoplastic deformation and collision handling on a 2D parametric atlas to reduce the extremely high number of degrees of freedom arising from large contact regions and high-resolution geometry. Such computationally challenging dynamic contact scenarios arise when objects with rich surface geometry are rubbed against each other while they bounce, roll or slide through the scene.
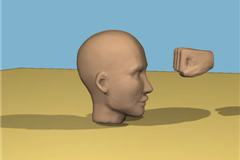
We simulate real-world deformable solids that can be modeled as a rigid core covered by a layer of deformable material, assuming that the deformation field of the surface can be expressed as a function in the parametric domain of the rigid core. Examples include animated characters, furniture, toys, tires, etc.
We have developed novel and efficient solutions for physically-based simulation of dynamic deformations, as well as for collision detection and robust contact response, by exploiting the layered representation of the models and decoupling the degrees of freedom between the core and the deformation layers.
Publications:
- ACM SIGGRAPH/Eurographics Symposium on Computer Animation 2006, Vienna, September 2006.
Related Publications:
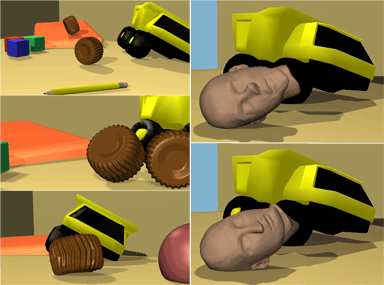
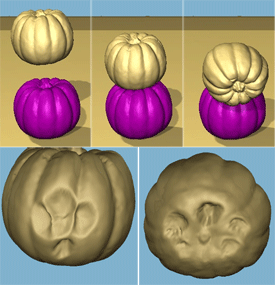
If you prefer not to download the entire video, we've added a few smaller clips of simulations computed with our algorithm. Click on the images below to download.