Participatory Route Planning (PRP)
In the proceedings of ACM SIGSPATIAL 2014
Overview
 We present an approach to “participatory route planning”, a novel concept that takes advantage of mobile devices, such as cellular phones or embedded systems in cars, to form an interactive, participatory network of vehicles that plan their travel routes based on the current traffic conditions and existing routes planned by the network of participants, thereby making more informed travel de-cision for each participating user. The premise of this approach is that a route, or plan, for a vehicle is also a prediction of where the car will travel. If routes are created for a sizable percentage of the total vehicle population, an estimate for the overall traffic pattern is attainable. Taking planned routes into account as predictions allows the entire traffic route planning system to better distribute vehicles and minimize traffic congestion. We present an approach that is suitable for realistic, city-scale scenarios, a prototype system to demonstrate feasibility, and experiments using a state-of-the-art microscopic traffic simulator.
We present an approach to “participatory route planning”, a novel concept that takes advantage of mobile devices, such as cellular phones or embedded systems in cars, to form an interactive, participatory network of vehicles that plan their travel routes based on the current traffic conditions and existing routes planned by the network of participants, thereby making more informed travel de-cision for each participating user. The premise of this approach is that a route, or plan, for a vehicle is also a prediction of where the car will travel. If routes are created for a sizable percentage of the total vehicle population, an estimate for the overall traffic pattern is attainable. Taking planned routes into account as predictions allows the entire traffic route planning system to better distribute vehicles and minimize traffic congestion. We present an approach that is suitable for realistic, city-scale scenarios, a prototype system to demonstrate feasibility, and experiments using a state-of-the-art microscopic traffic simulator.
Full Paper Download
Paper (PDF)Results
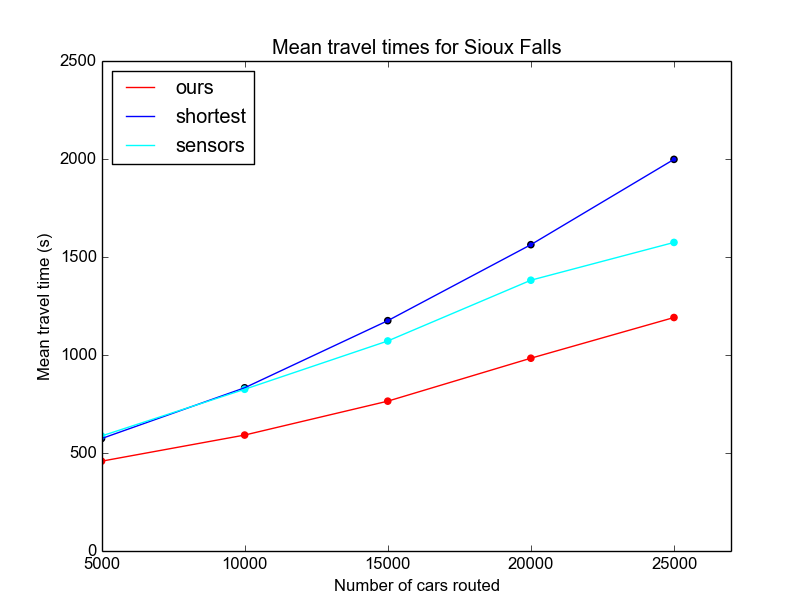
This figure shows the mean travel times for varying numbers of vehicles using our method, a shortest-path baseline (SP), and a commercial-like system using sensor data (SD). We observe that our method (red) outperformed both the shortest-path baseline (navy) and the commercial-like system with sensor data (sky blue). For more results, please refer to our full paper.