Abstract
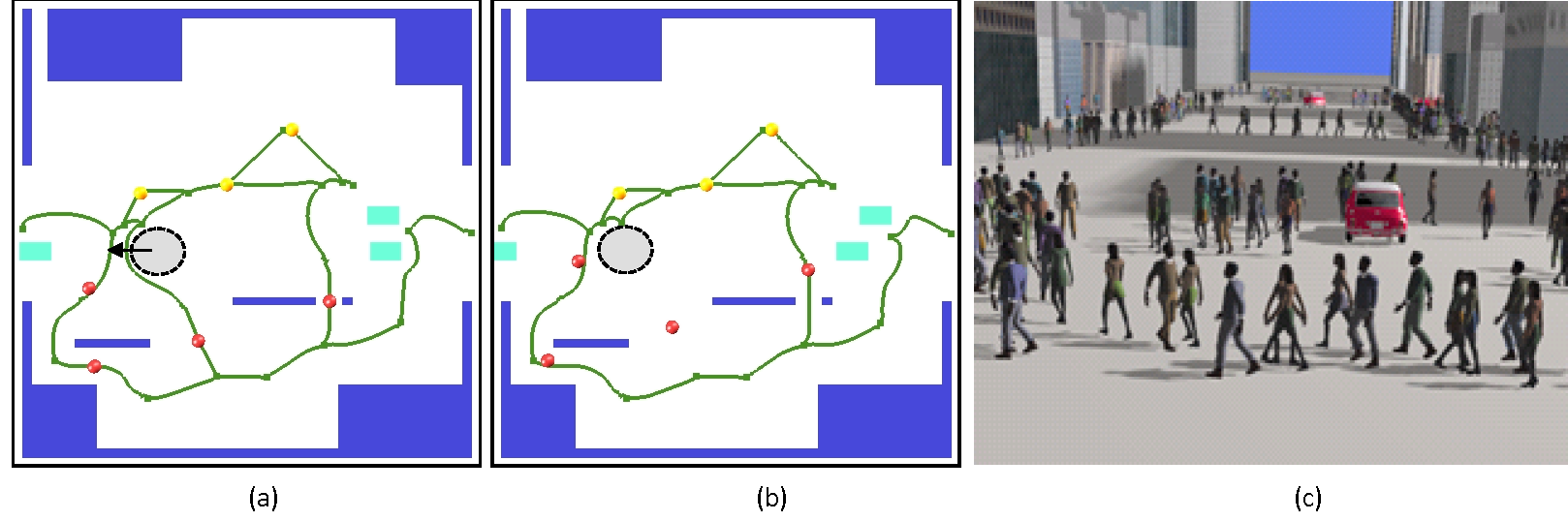
We present a novel algorithm for motion planning of multiple robots amongst dynamic obstacles. Our approach is based on a new roadmap representation that uses deformable links and dynamically retracts to capture the connectivity of the free space. We use Newtonian Physics and Hooke's Law to update the position of the milestones and deform the links in response to the motion of other robots and the obstacles. Based on this roadmap representation, we describe our planning algorithms that can compute collision-free paths for tens of robots in dynamic environments.