2 - University of North Carolina at Chapel Hill, USA
*Tongtong Wang and Zhihua Liu are joint first authors. Min Tang is the corresponding author.
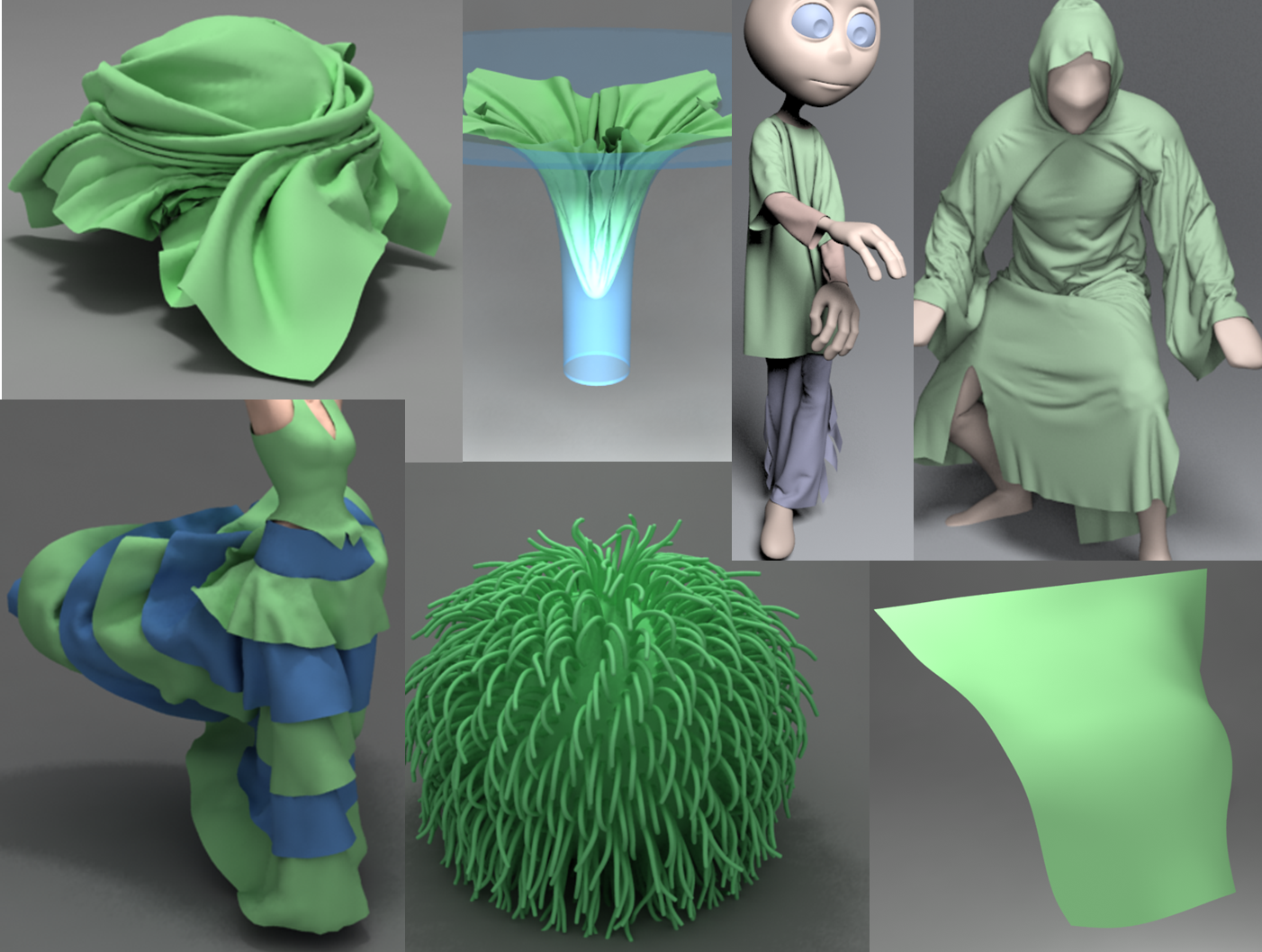
Benchmarks:
We use seven challenging benchmarks arising from deformable and cloth simulations. We compare the performance of our DCD and CCD algorithms with prior methods.
Abstract
We present an efficient and accurate algorithm for self-collision detection in deformable models. Our approach can perform discrete and continuous collision queries on triangulated meshes. We present a simple and linear time algorithm to perform the normal cone test using the unprojected 3D vertices, which reduces to a sequence point-plane classification tests. Moreover, we present a hierarchical traversal scheme that can significantly reduce the number of normal cone tests and the memory overhead using front-based normal cone culling. The overall algorithm can reliably
detect all (self) collisions in models composed of hundred of thousands of triangles. We observe considerable performance improvement over prior CCD algorithms.
Paper (PDF 2.48 MB)
Tongtong Wang, Zhihua Liu, Min Tang, Roufeng Tong, and Dinesh Manocha, Efficient and Reliable Self-Collision Culling using Unprojected Normal Cones, Computer Graphics Forum, accepted, 2017. @article{scc17,
Video (19 MB) MCCD: Multi-Core Collision Detection between
Deformable Models using Front-Based Decomposition
CAMA: Contact-Aware Matrix Assembly with Unified Collision Handling for GPU-based Cloth Simulation
TightCCD: Efficient and Robust Continuous Collision Detection using Tight Error Bounds
Fast and Exact Continuous Collision Detection with Bernstein Sign Classification
A GPU-based Streaming Algorithm for High-Resolution Cloth Simulation
UNC dynamic model benchmark repository
Collision-Streams: Fast GPU-based Collision Detection for Deformable Models
Fast Continuous Collision Detection using Deforming Non-Penetration
Filters
Fast Collision Detection for
Deformable Models using Representative-Triangles
DeformCD: Collision Detection
between Deforming Objects
Self-CCD: Continuous Collision
Detection for Deforming Objects
Interactive Collision Detection
between Deformable Models using Chromatic Decomposition
Fast Proximity Computation Among
Deformable Models using Discrete Voronoi Diagrams
CULLIDE: Interactive Collision
Detection between Complex Models using Graphics Hardware
RCULLIDE: Fast and Reliable
Collision Culling using Graphics Processors
Quick-CULLIDE: Efficient Inter-
and Intra-Object Collision Culling using Graphics Hardware
CB #3175, Department of Computer Science
Contents
author = {Wang, Tongtong and Liu, Zhihua and Tang, Min and Tong, Ruofeng and Manocha, Dinesh},
title = {Efficient and Reliable Self-Collision Culling using Unprojected Normal Cones},
journal = {Computer Graphics Forum (accepted)},
volume = {X},
number = {X},
pages = {X--X},
year = {2017},
}
Related Links
University of North Carolina
Chapel Hill, NC 27599-3175
919.962.1749
geom@cs.unc.edu