Abstract
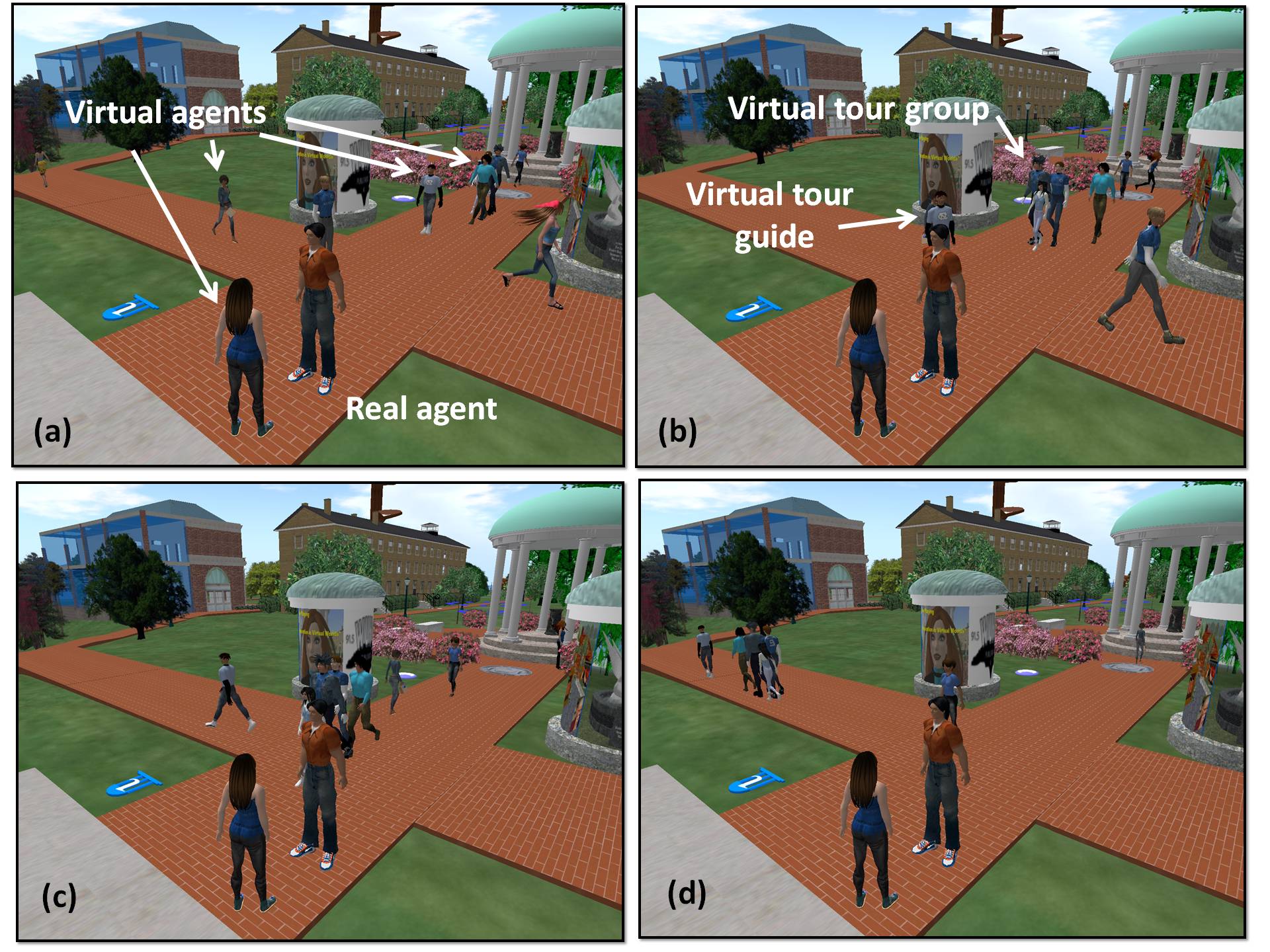
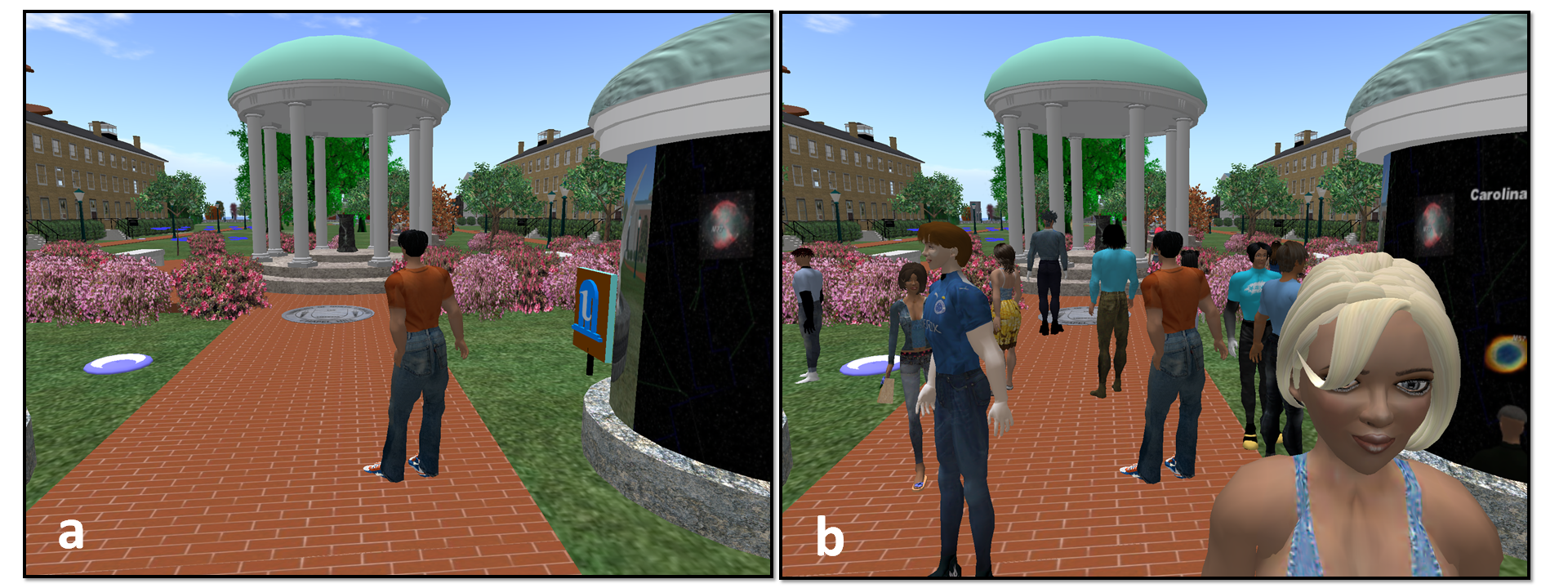
We present an approach for navigating autonomous virtual agents in online virtual worlds that are based on a centralized server network topology. Each agent's motion is controlled through local and global navigation. Our local navigation model is based on artificial social forces that has been extended to account for inaccurate sensing from network latency. Global navigation for each virtual agent is based on cell decomposition and computes high level paths. The overall computation is balanced by performing local navigation on client machines and global navigation on the server. We have implemented our navigation algorithm into the Second Life virtual world and highlight our results by simulating up to $18$ virtual agents over multiple different client computers.