Star-shaped Roadmaps
Conference Version
Gokul Varadhan,
Dinesh Manocha, "Star-shaped Roadmaps - A Deterministic Sampling
Approach for Complete Motion Planning", Robotics Science & Systems
2005
Technical Report
Gokul Varadhan,
Dinesh Manocha, "Star-shaped Roadmaps - A Deterministic Sampling
Approach for Complete Motion Planning", UNC Technical Report TR05-001
Abstract
We present a simple approach for complete motion planning using
deterministic sampling. Our approach relies on computing a novel
star-shaped roadmap of the free space. We partition the free space
into star-shaped regions such that a single point called the guard can
see every point in the region. The resulting set of guards capture
the intra-region connectivity. We capture the inter-region
connectivity by computing connectors that connect guards of adjacent
regions. We use the guards and connectors to construct a star-shaped
roadmap of the free space. We show how to construct the roadmap in a
deterministic manner without computing an explicit representation of
the free space. We prove that the star-shaped roadmap captures the
connectivity of the free space and provides sufficient information to
perform complete motion planning. One of the benefits of our approach
is that it eliminates the need for explicit local planning; the
star-shaped property provides it implicitly. Our approach is
relatively simple to implement.
Videos
Notes:
- Download and install FRAPS264.EXE
- Download and run the videos using Windows Media Player
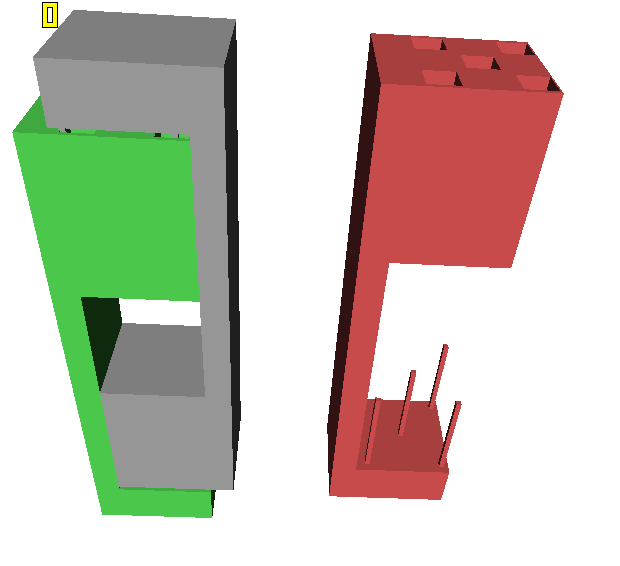
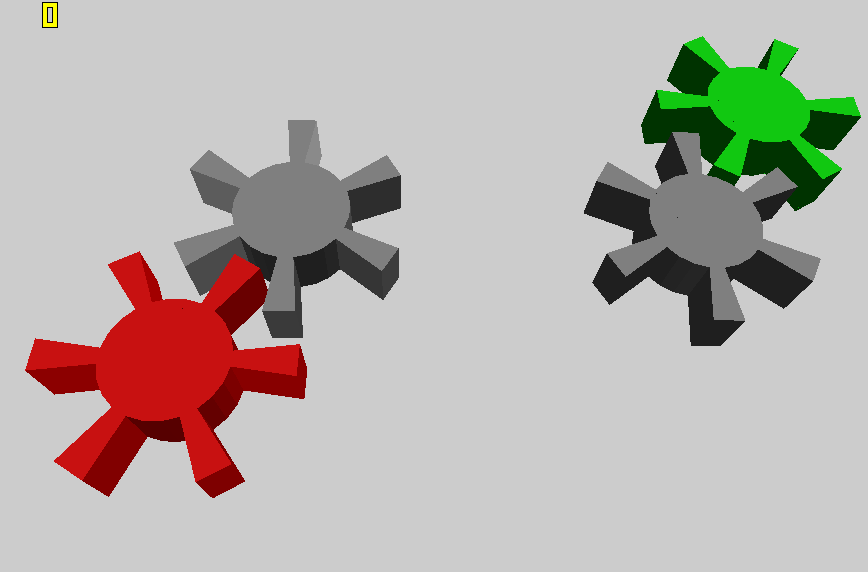
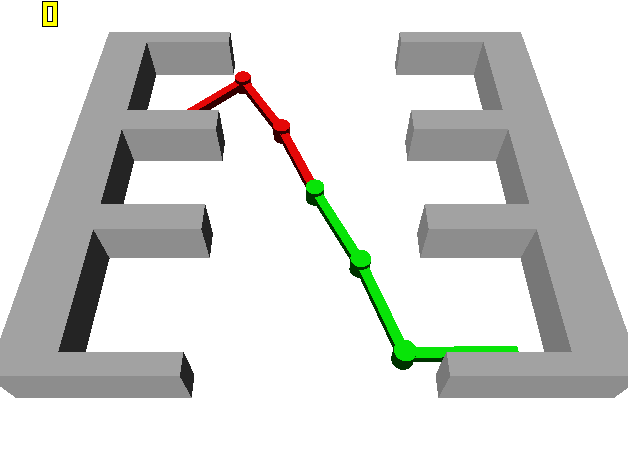
- Red and green colors indicate initial and goal configurations
3D Assembly (Translation)
Planar Translating and rotating robot
Planar Articulated robot with 3
revolute joints