by Ilknur Kabul, Russell Gayle, and Ming Lin.
We
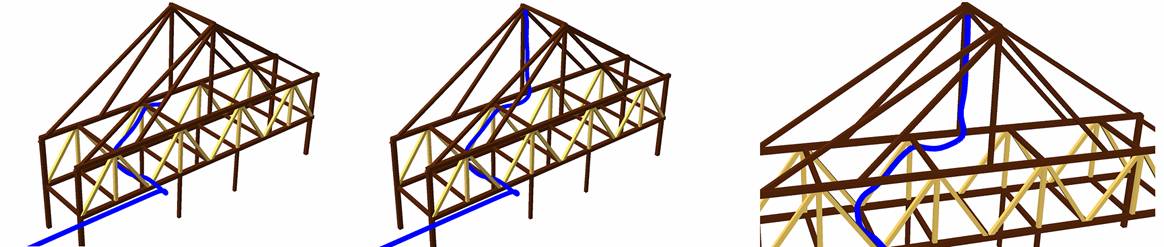
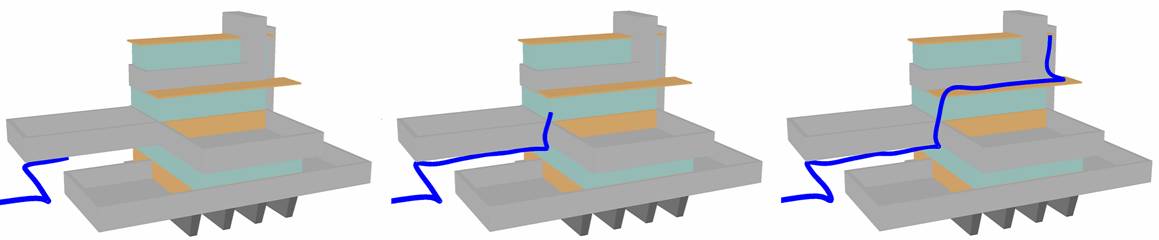
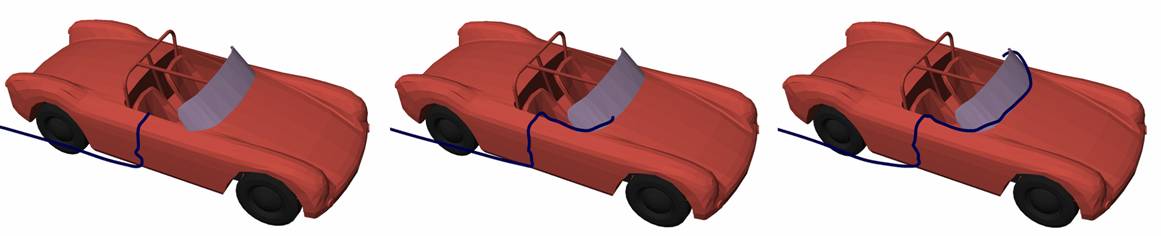
present a route planning algorithm for cable and wire layouts in complex
environments. Our algorithm precomputes
a global roadmap of the environment by using a variant of the probabilistic
roadmap method (PRM) and performs constrained sampling near the contact space. Given
the initial and the final configurations, we compute an approximate path using
the initial roadmap generated on the contact space. We refine the approximate path by performing constrained
sampling and use adaptive forward dynamics to compute a penetration-free
path. Our algorithm takes into account
geometric constraints like non-penetration and physical constraints like
multi-body dynamics and joint limits. We
highlight the performance of our planner on different scenarios of varying
complexity.
|
Benckmark
I: Cable route planning on the Bridge Model |
|
Benckmark
II: Cable route planning on the House Model |
|
Benckmark
III: Cable route planning on the Building Model |
|
Benckmark
IV: Cable route planning on the Car Model |

Contents
Ilknur Kabul,
Russell Gayle, Ming Lin
2007 ACM Solid and Physical
Modeling Symposium (SPM'2007),
Short Paper
Related Links
Adaptive Dynamics of Articulated Bodies
Practical Local Planning in
the Contact Space
Constraint-Based Motion Planning of
Deformable Robots
FlexiPlan
- Path Planning for Deformable Robots in Complex Environments
CB #3175, Department of Computer Science
University of North Carolina
Chapel Hill, NC 27599-3175
919.962.1749
geom@cs.unc.edu