|
|
|
|
|
|
|
|
|
 |
|
|
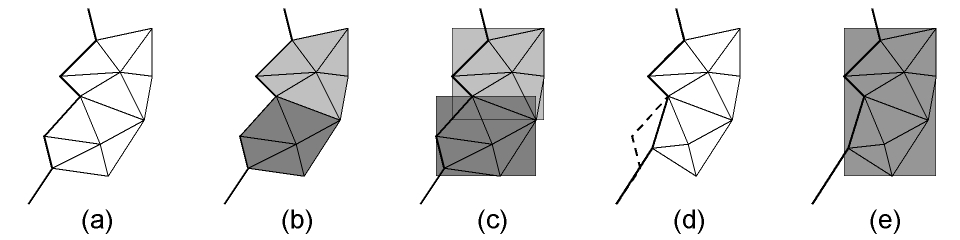
(a) Initial surface; (b) Clusters of triangles; (c) Bounding volumes for each cluster (in this case AABBs); (d) Mesh simplification; (e) Bounding volume of the union of clusters, after some conditions are met. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(a) Initial surface; (b) Clusters of triangles; (c) Bounding volumes for each cluster (in this case AABBs); (d) Mesh simplification; (e) Bounding volume of the union of clusters, after some conditions are met. |
|
Abstract: We present "contact levels of detail" (CLOD), a novel framework for multi-resolution collision detection. Given a polyhedral model, our algorithm automatically builds a "dual hierarchy", both a multi-resolution representation of the original model and its bounding volume hierarchy for accelerating collision queries. We have proposed various error metrics, including object-space errors, velocity dependent gap, screen-space errors and their combinations. At runtime, our algorithm uses these error metrics to select the appropriate levels of detail independently at each potential contact location. Compared to the existing exact collision detection algorithms, we observe significant performance improvement using CLODs on some benchmarks, with little degradation in the visual rendering of simulations.
| PAPER |
| CLODs: Dual
Hierarchies for Multiresolution Collision Detection.
In Proceedings
of Eurographics Symposium on Geometry Processing. pp. 94-101. Aachen, Germany.
2003.
pdf file (1.1MB). |
| RELATED LINKS |
| Collision
Detection by GAMMA group.
LOD Simulation and Animation by GAMMA group. |
This material is presented to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted without the explicit permission of the copyright holder.