 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
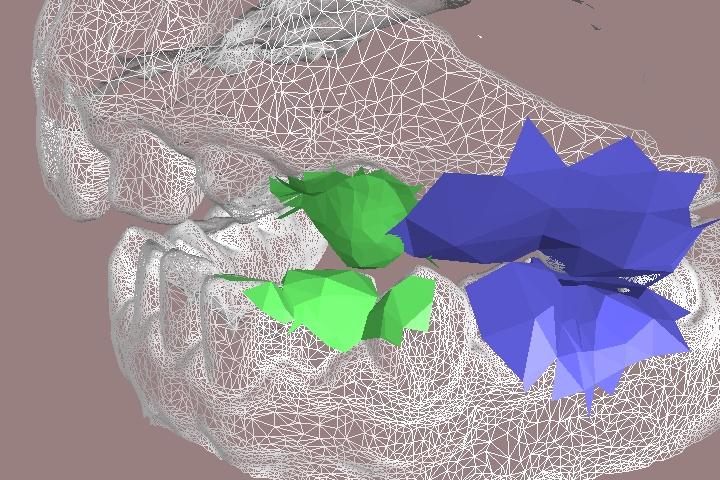
Abstract: We introduce a novel "sensation preserving" simplification algorithm for faster collision queries between two polyhedral objects in haptic rendering. Given a polyhedral model, we construct a multi-resolution hierarchy using "filtered edge collapse", subject to constraints imposed by collision detection. The resulting hierarchy is then used to compute fast contact response for haptic display. The computation model is inspired by human tactual perception of contact information. We have successfully applied and demonstrated the algorithm on a time-critical collision query framework for haptically displaying complex object-object interaction. Compared to existing exact contact query algorithms, we observe noticeable performance improvement in update rates with little degradation in the haptic perception of contacts.
| PAPER |
| Sensation
Preserving Simplification for Haptic Rendering.
In Proceedings
of ACM SIGGRAPH 2003 / ACM Transactions on Graphics, Vol. 22. pp. 543-553.
San Diego, Ca. 2003.
pdf file (2MB). |
| VIDEOS |
| Complete video MPEG1 (200MB). |
This material is presented to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted without the explicit permission of the copyright holder.