 |
Menge
Modular Pedestrian Simulation Framework for Research and Development
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
Menge
Modular Pedestrian Simulation Framework for Research and Development
|
The base class for obstacle set definitions. More...
#include <ObstacleSet.h>
Public Member Functions | |
| ObstacleSet () | |
| Default constructor. | |
| virtual size_t | obstacleCount ()=0 |
| Reports the number of obstacles in the set. More... | |
| virtual Obstacle * | getObstacle (size_t i)=0 |
| Returns the ith obstacle. More... | |
| virtual void | setClass (size_t cl) |
| Sets the class of this obstacle set. More... | |
| virtual size_t | getClass () |
| Gets the class of this obstacle set. More... | |
 Public Member Functions inherited from Menge::Element Public Member Functions inherited from Menge::Element | |
| void | destroy () |
| This supplants the destructor. More... | |
| virtual BFSM::Task * | getTask () |
| Return an optional task associated with this element. More... | |
| virtual SceneGraph::GLNode * | getSGNode () |
| Returns an optional visualization element associated with the element. More... | |
Protected Member Functions | |
| virtual | ~ObstacleSet () |
| Protected destructor. The destroy method should be used to delete an instance of an obstacle set. | |
Protected Attributes | |
| size_t | _class |
| The class for the obstacles in this set. More... | |
Friends | |
| class | ObstacleSetFactory |
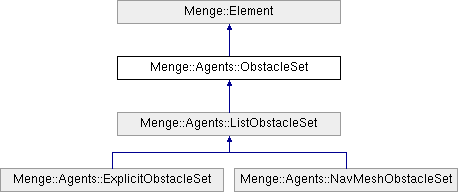
The base class for obstacle set definitions.
This is an abstract class defining the functions of an obstacle set in Menge Obstacle sets must be able to provide a count of Obstacles in their definition and pass those obstacles on to the SpatialQuery
|
inlinevirtual |
Gets the class of this obstacle set.
|
pure virtual |
Returns the ith obstacle.
| i | The index of the requested obstacle. |
| ObstacleSetException | if the index, i, is invalid. |
Implemented in Menge::Agents::ListObstacleSet.
|
pure virtual |
Reports the number of obstacles in the set.
Implemented in Menge::Agents::ListObstacleSet.
|
inlinevirtual |
Sets the class of this obstacle set.
| cl | the class id to which the obstacle set belongs. |
|
protected |
The class for the obstacles in this set.
This works with the BaseAgent::_obstacleSet member to determine which obstacles affect an agent.
 1.8.8
1.8.8