|
Complete Motion
Planning
GAMMA
Group
University of North
Carolina at Chapel Hill
Background
Motion
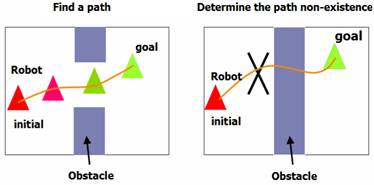
planning is a fundamental problem in robotics. The problem can be stated as
finding a path for a robot, such that the robot can move along this path from
its initial configuration to goal configuration without intersecting with any
obstacle in the scene. Motion planning methods have been widely applied for
robotics, computed aided design, bioinformatics and many other fields.
We
have developed efficient and practical algorithms for complete motion
planning. A complete motion planner either computes a collision-free path
from the initial configuration to the final configuration or concludes that
no such path exists.
Videos
|
|
|
|
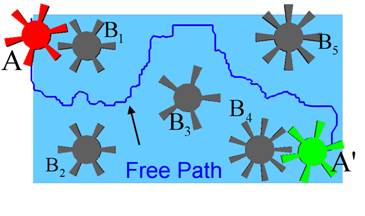
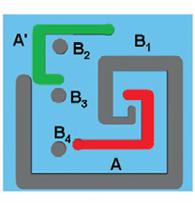
Find a path
(video)
|
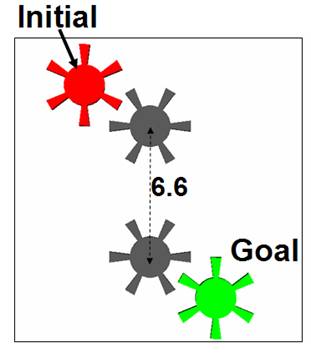
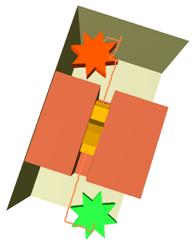
Path
non-existence. Our algorithm only takes 3.356s to determine it. (Video)
|
|
|
|
|
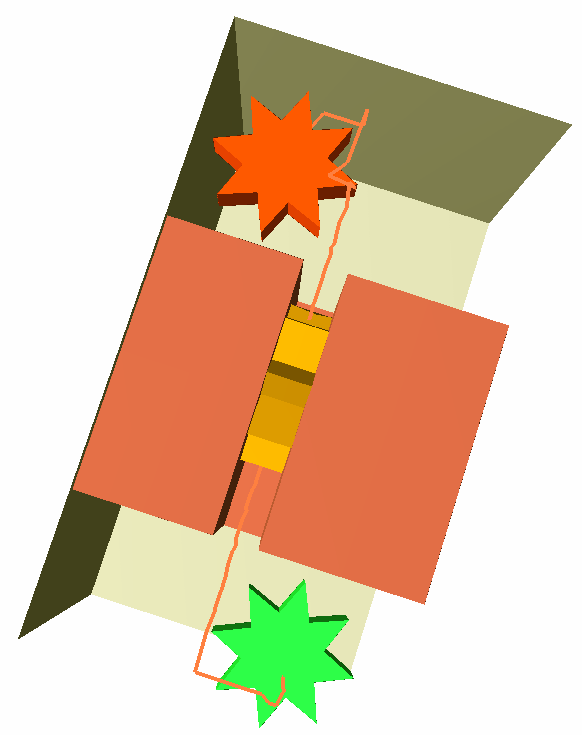
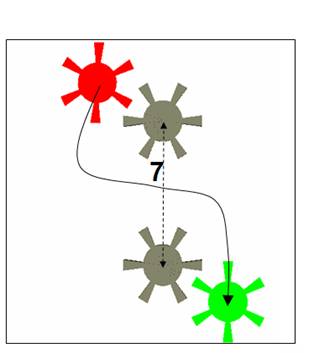
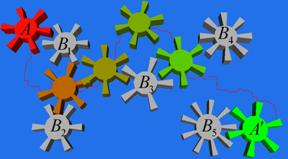
Five gear
example (video)
|
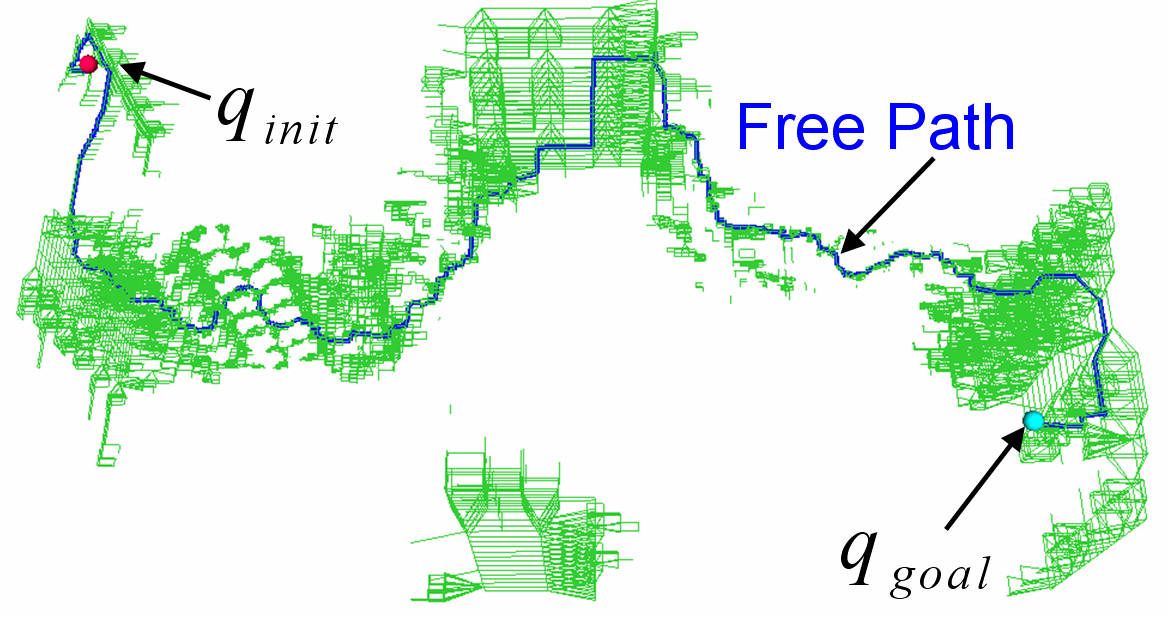
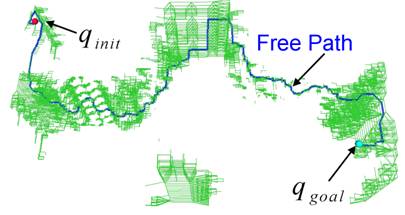
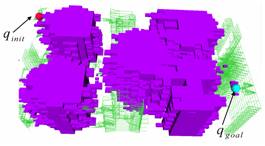
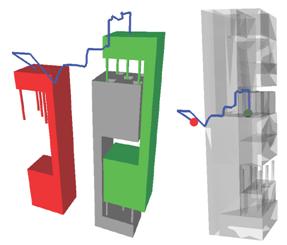
The
collision-free path and a connectivity graph in the free space of the
robot's 3 dimensional C-space.
|
Publications
|
|
Global Vector Field Computation
for Feedback Motion Planning
Liangjun
Zhang, Steven M. LaValle, Dinesh Manocha
IEEE International Conference on Robotics and
Automation (ICRA), 2009
Project
Webpage Paper
Videos
|
|
|
Efficient Cell Labelling and Path Non-existence Computation using
C-obstacle Query
Liangjun
Zhang, Young J. Kim, Dinesh Manocha
The International Journal of Robotics Research,
November/December 2008 vol. 27 no. 11-12 1246-1257
Paper
|
|
|
A Hybrid Approach for Complete
Motion Planning
Liangjun
Zhang, Young J. Kim, Dinesh Manocha
IEEE/RSJ International Conference On Intelligent
Robots and Systems (IROS),
2007
UNC-CS Tech Report 06-022, 2006
PDF (1M); VIDEO 1(MPEG, 5M); VIDEO 2(AVI,
18M)
|
|
|
A Simple Path Non-Existence
Algorithm Using C-obstacle Query
Liangjun
Zhang, Young J. Kim, Dinesh Manocha
The Seventh International Workshop on the
Algorithmic Foundations of Robotics (WAFR), 2006
Paper (1M), WAFR
Presentation (1.8M)
|
|
|
Fast C-obstacle Query
Computation for Motion Planning
Liangjun
Zhang, Young J. Kim, Gokul Varadhan, Dinesh Manocha
IEEE International Conference on Robotics and
Automation (ICRA), 2006, 3035-3040
PDF(1.4M) ICRA
Presentation(1.1M)
|
|
|
Topology Preserving Free
Configuration Space Approximation
Gokul
Varadhan, Young J. Kim, Shankar Krishnan,
Dinesh Manocha
IEEE International Conference on Robotics and
Automation (ICRA), 2006
PDF(1M)
|
|
|
Star-shaped Roadmaps - A
Deterministic Sampling Approach for Complete Motion Planning
Gokul
Varadhan, Dinesh Manocha
Robotics: Science and Systems 2006
Project
WWW Page
|
Related Work
- Generalized
Penetration Depth Computation: Project
WWW page
- Efficient
Approximate Algorithms for Boolean Operations, Motion Planning, Sweeps,
and Minkowski Sum: Project WWW page
|