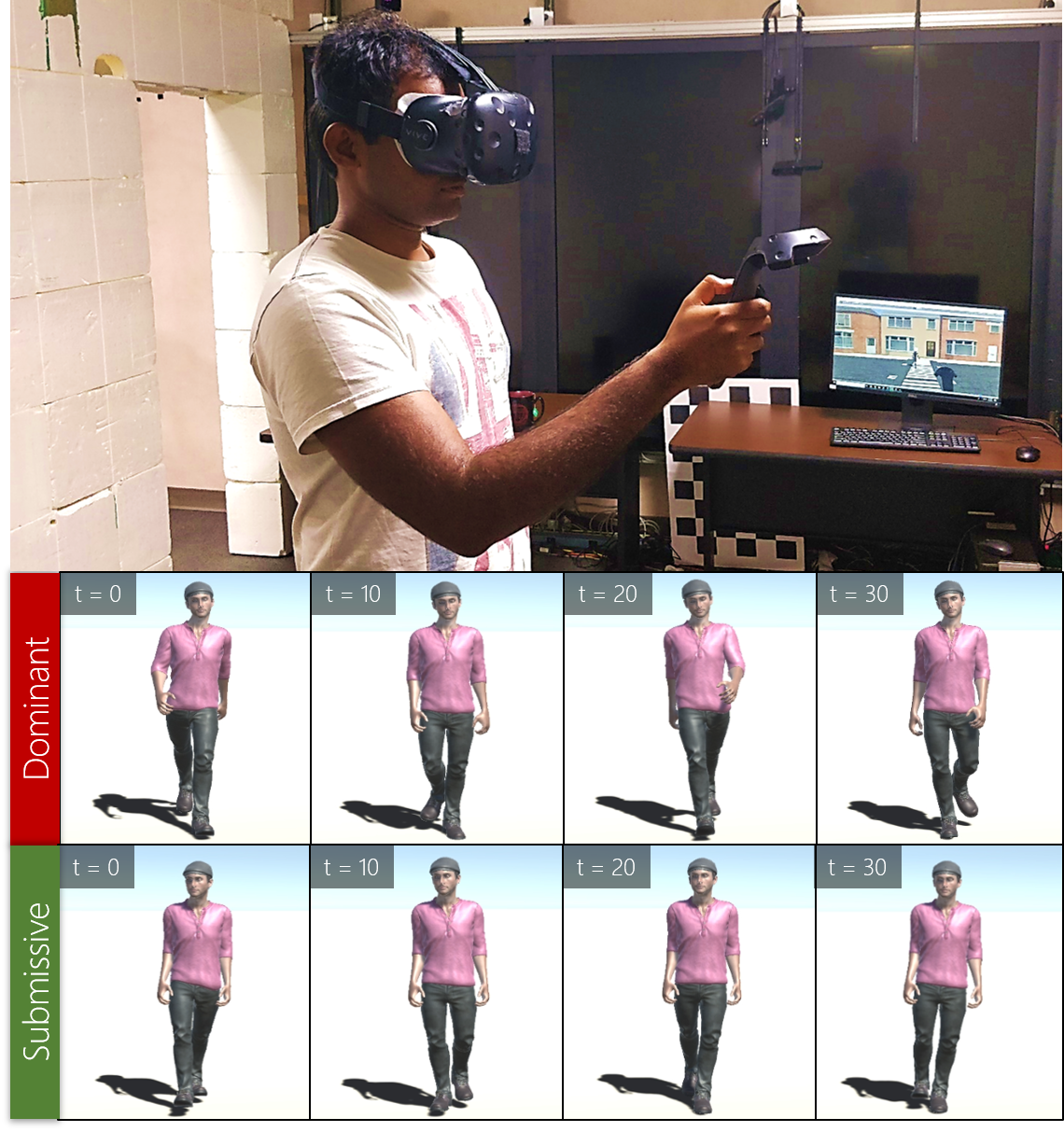
Modeling Data-Driven Dominance Traits for Virtual Characters using Gait Analysis
We present a data-driven algorithm for generating gaits of virtual characters with varying dominance traits. Our gait dominance classification algorithm can classify the dominance traits of gaits with 73% accuracy. We also present an application of our approach that simulates interpersonal relationships between virtual characters. To the best of our knowledge, ours is the first practical approach to classifying gait dominance and generate dominance traits in virtual characters
Learn MoreData-Driven Modeling of Group Entitativity in Virtual Environments
We present a data-driven algorithm to model and predict the socio-emotional impact of groups on observers. Psychological research finds that highly entitative i.e. cohesive and uniform groups induce threat and unease in observers. Our algorithm models realistic trajectory-level behaviors to classify and map the motion-based entitativity of crowds. This mapping is based on a statistical scheme that dynamically learns pedestrian behavior and computes the resultant entitativity induced emotion through group motion characteristics. We also present a novel interactive multi-agent simulation algorithm to model entitative groups and conduct a VR user study to validate the socio-emotional predictive power of our algorithm. We further show that model-generated high-entitativity groups do induce more negative emotions than low-entitative groups.
Learn More
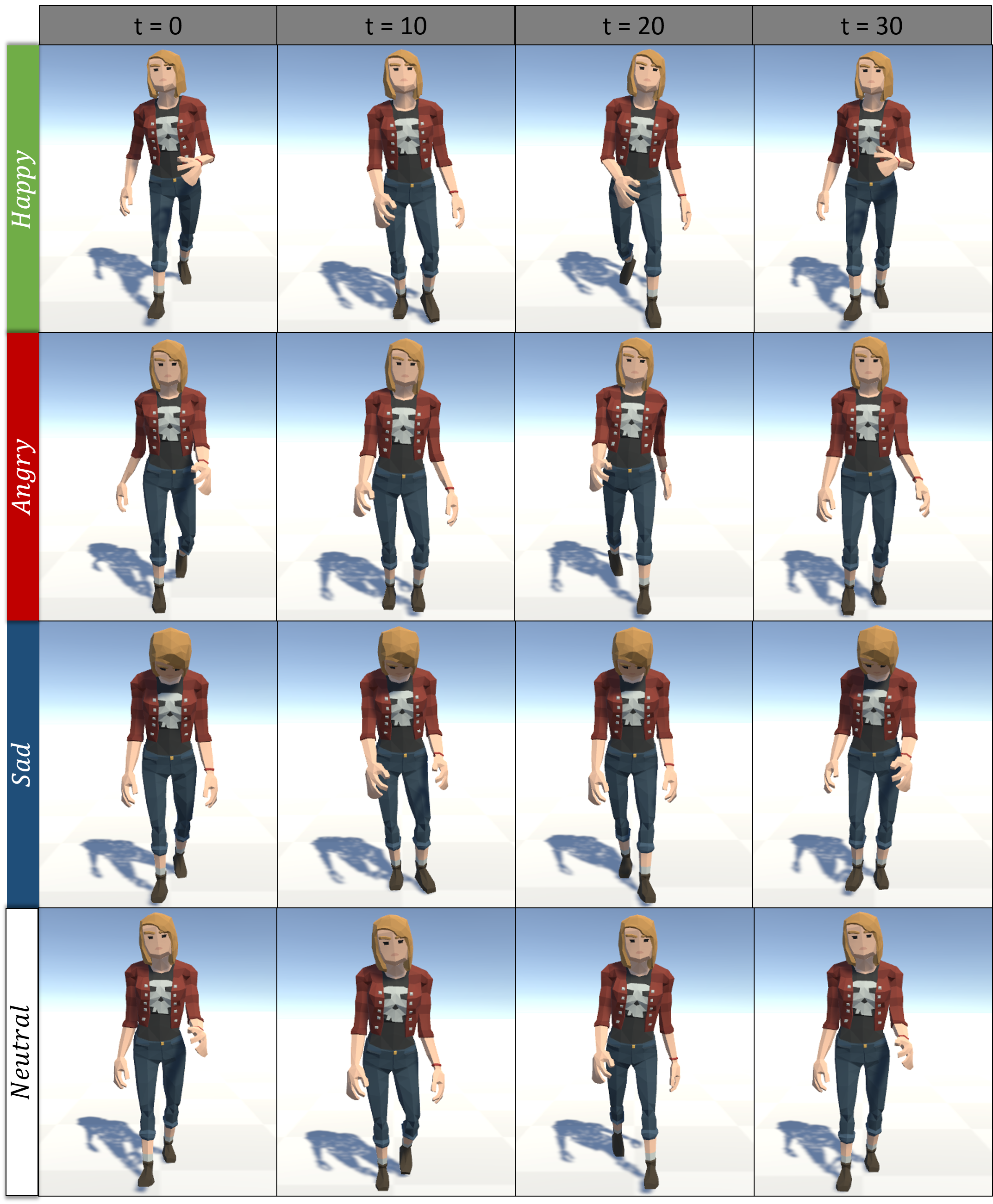
EVA: Generating Emotional Behavior of Virtual Agents using Expressive Features of Gait and Gaze
We present a novel, real-time algorithm, EVA, for generating virtual agents with various emotions. Our approach is based on using non-verbal movement cues such as gaze and gait to convey emotions corresponding to happy, sad, angry, or neutral. Our studies suggest that the use of EVA and gazing behavior can considerably increase the sense of presence in scenarios with multiple virtual agents. Our results also indicate that both gait and gazing features contribute to the perceptions of emotions in virtual agents.
Learn MoreThe Socially Invisible Robot:
Navigation in the Social World using Robot Entitativity
We present a real-time, data-driven algorithm to enhance the social-invisibility of robots within crowds. Our approach is based on prior psychological research, which reveals that people notice and--importantly--react negatively to groups of social actors when they have high entitativity, moving in a tight group with similar appearances and trajectories. In order to evaluate that behavior, we performed a user study to develop navigational algorithms that minimize entitativity. This study establishes mapping between emotional reactions and multi-robot trajectories and appearances, and further generalizes the finding across various environmental conditions. We demonstrate the applicability of our entitativity modeling for trajectory computation for active surveillance and dynamic intervention in simulated robot-human interaction scenarios. Our approach empirically shows that various levels of entitative robots can be used to both avoid and influence pedestrians while not eliciting strong emotional reactions, giving multi-robot systems socially-invisibility.
Learn More
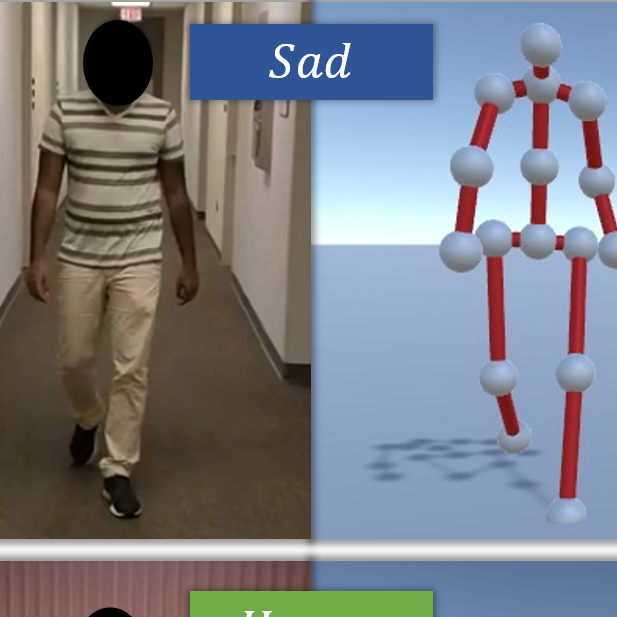
Identifying Emotions from Walking using Affective and Deep Features
We present a new data-driven model and algorithm to identify the perceived emotions of individuals based on their gaits. Using affective features computed using psychological findings and deep features learned using LSTM we classify the emotional state of the human into one of four emotions: happy, sad, angry, or neutral with an accuracy of 74.10%. We also present an "EWalk (Emotion Walk)" dataset that consists of videos of walking individuals with gaits and labeled emotions. To the best of our knowledge, this is the first gait-based model to identify perceived emotions from videos of walking individuals.
Learn MoreFVA: Modeling Perceived Friendliness of Virtual Agents Using Movement Characteristics
We present a new approach to improve the friendliness and warmth of a virtual agent in an AR environment by generating appropriate movement characteristics. Our algorithm is based on a novel data-driven friendliness model that is computed using a user-study and psychological characteristics. We investigated the perception of a user in an AR setting and observed that an FVA has a statistically significant improvement in the perceived friendliness and social presence of a user compared to an agent without the friendliness modeling.
Learn More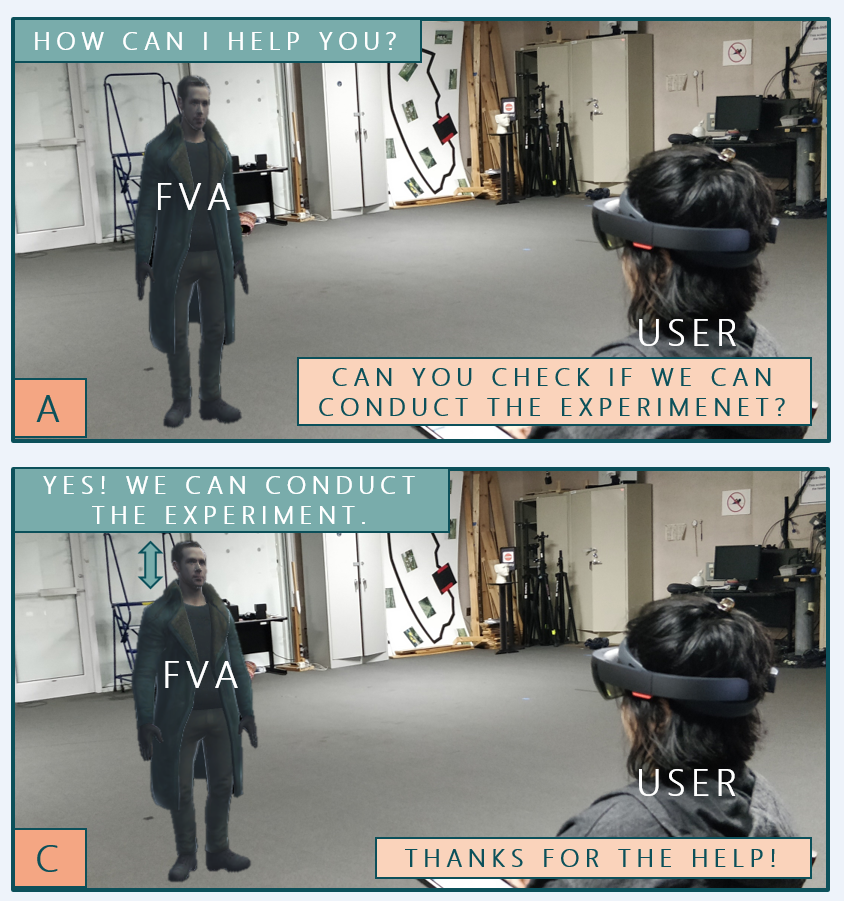
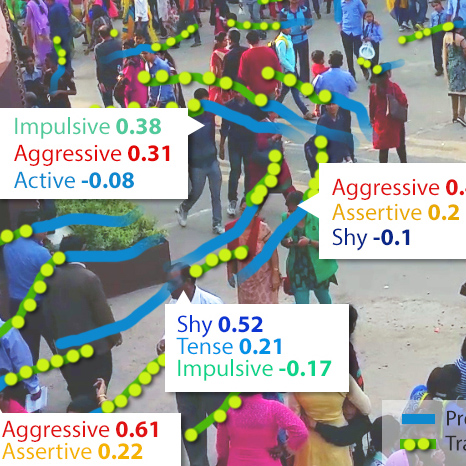
Aggressive, Tense, or Shy?
Identifying Personality Traits from Crowd Videos
We present a real-time algorithm to automatically classify the dynamic behavior or personality of a pedestrian based on his or her movements in a crowd video. Our classification criterion is based on Personality Trait Theory. We present a statistical scheme that dynamically learns the behavior of every pedestrian in a scene and computes that pedestrian's motion model. This model is combined with global crowd characteristics to compute the movement patterns and motion dynamics, which can also be used to predict the crowd movement and behavior. We highlight its performance in identifying the personalities of different pedestrians in low- and high-density crowd videos. We also evaluate the accuracy by comparing the results with a user study.
Learn MoreSocioSense: Robot Navigation Amongst Pedestrians with Social and Psychological Constraints
We present a real-time algorithm, SocioSense, for socially-aware navigation of a robot amongst pedestrians. Our approach computes time-varying behaviors of each pedestrian using Bayesian learning and Personality Trait theory. These psychological characteristics are used for long-term path prediction and generating proxemic characteristics for each pedestrian. We combine these psychological constraints with social constraints to perform human-aware robot navigation in low- to medium-density crowds. The estimation of time-varying behaviors and pedestrian personalities can improve the performance of long-term path prediction by 21%, as compared to prior interactive path prediction algorithms. We also demonstrate the benefits of our socially-aware navigation in simulated environments with tens of pedestrians.
Learn More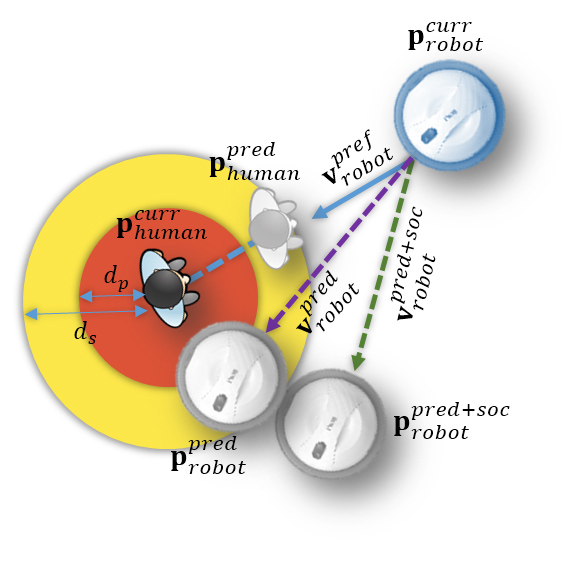

Pedestrian Dominance Modeling for Socially-Aware Robot Navigation
We present a Pedestrian Dominance Model (PDM) to identify dominance of pedestrians for robot navigation. Using a perception study on a simulated dataset of pedestrians, PDM models the perceived dominance of pedestrians with varying motion behaviors corresponding to the trajectory, speed, and personal space. At runtime, we use PDM to identify the dominance of pedestrians to facilitate socially-aware navigation of robots. Our approach builds on prior studies in psychology literature which indicate that when interacting with humans, people are more comfortable around people that exhibit complementary behavior in movement, and vice versa. Our robot navigation algorithm leverages this by enabling the robots to exhibit complementing responses to pedestrian dominance. We also present an application of PDM to generate dominance-based collision-avoidance behaviors in the navigation of autonomous vehicles among pedestrians. We demonstrate the benefits of our algorithm for robots navigating among tens of pedestrians in simulated environments.
Learn More