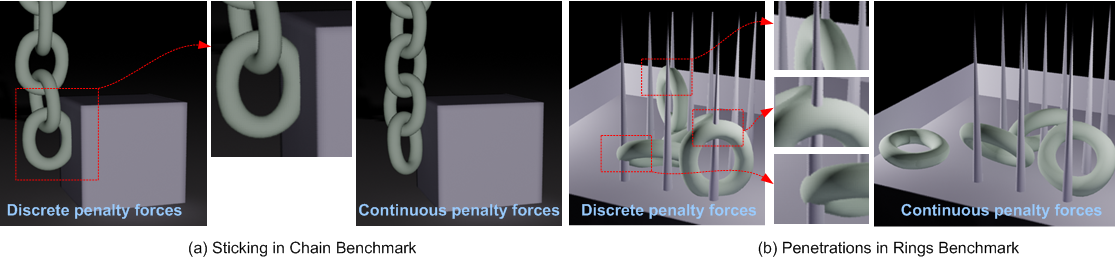
Figure 1: Sticking and penetration problems: We highlight sticking and penetration problems in the Chain Benchmark (a)(14.3k triangles, 60fps) and the Rings Benchmark (b)(7.4k triangles, 35fps) with traditional penalty methods. Our novel continuous penalty force formulation can alleviate these problems based on continuous collision and force computation.
Abstract
We present a simple algorithm to compute continuous penalty forces to determine collision response between rigid and deformable models bounded by triangle meshes. Our algorithm provides a well-behaved solution in contrast to the traditional stability and robustness problems of penalty methods, induced by force discontinuities. We trace contact features along their deforming trajectories and accumulate penalty forces along the penetration time intervals between the overlapping feature pairs. Moreover, we present a closed-form expression to compute the continuous and smooth collision response. Our method has very small additional overhead compared to previous penalty methods, while significantly improves the stability and robustness. We highlight its benefits on several benchmarks.
Contents
Paper (PDF 834 KB)
Min Tang, Dinesh Manocha, Miguel A. Otaduy, and Ruofeng Tong,
Continuous Penalty Forces, ACM Transactions on Graphics, 31(4), Article 107 (July 2012), 9 pages (Proc. of ACM SIGGRAPH). 2012.
@ARTICLE {CPF, Video (25.2 MB)
UNC dynamic model benchmark
repository
VolCCD: Fast Continuous Collision
Culling between Deforming Volume Meshes
Collision-Streams: Fast
GPU-based Collision Detection for Deformable Models
Fast Continuous Collision Detection
using Deforming Non-Penetration Filters MCCD: Multi-Core Collision Detection between
Deformable Models using Front-Based Decomposition
Fast Collision Detection for
Deformable Models using Representative-Triangles
DeformCD: Collision Detection
between Deforming Objects
Interactive Collision Detection
between Deformable Models using Chromatic Decomposition
Fast Proximity Computation Among
Deformable Models using Discrete Voronoi Diagrams
CULLIDE: Interactive Collision
Detection between Complex Models using Graphics Hardware
RCULLIDE: Fast and Reliable
Collision Culling using Graphics Processors
Quick-CULLIDE: Efficient Inter-
and Intra-Object Collision Culling using Graphics Hardware
We would like to thank Fran\c{c}ois Faure and the SOFA team for their support, and Jianfei Chen for useful discussions. This research is supported in part by NSFC (61170140), the National Basic Research Program of China (2011CB302205), the National Key Technology R&D Program of China (2012BAD35B01), NSFZC (Y1100069). Manocha is supported in part by ARO Contract W911NF-10-1-0506, NSF awards 0917040, 0904990, 1000579 and 1117127, and Intel. Otaduy is supported in part by the Spanish Ministry of Science and Innovation (TIN2009-07942) and by the European Research Council (ERC-2011-StG-280135 Animetrics). Tong is partly supported by NSFC (61170141).
CB #3175, Department of Computer Science
author = {Tang, Min and Manocha, Dinesh and Otaduy, Miguel A. and Tong, Ruofeng},
title = {Continuous Penalty Forces},
journal = {ACM Trans. Graph.},
volume = {31},
issue = {4},
month = {July},
year = {2012},
pages = {107:1--107:9},
}
Related Links
Acknowledgements
University of North Carolina
Chapel Hill, NC 27599-3175
919.962.1749
geom@cs.unc.edu